ЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЩшМЦ(КЌCADЭМ,SolidWorksШ§ЮЌ)(ТлЮФЫЕУїЪщ10900зж,CADЭМжН9еХ,SolidWorksШ§ЮЌЭМ)
Design of hydraulic control system for four wheel positioning and lifting machine for automobile
еЊвЊ
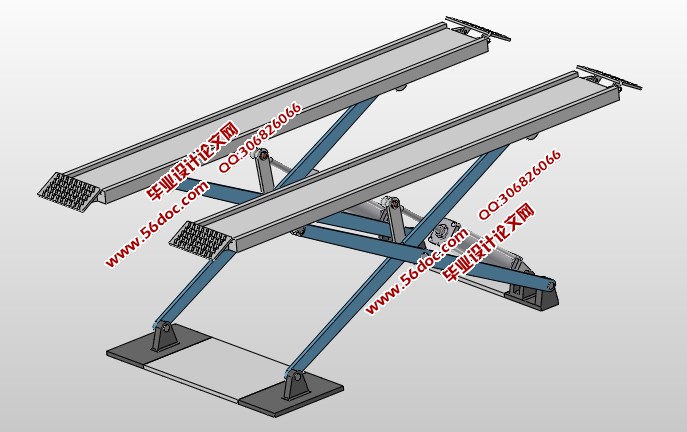
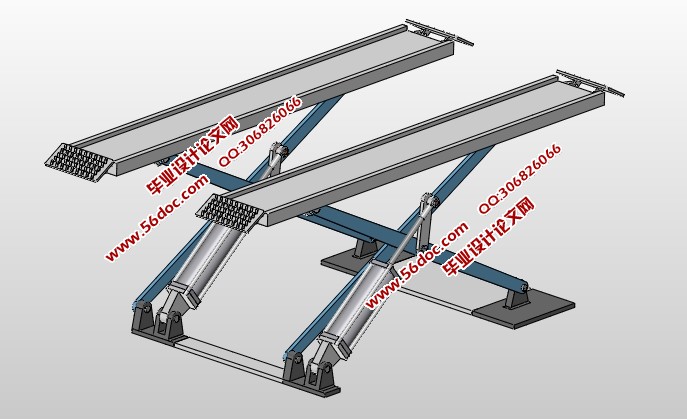
БОЦЊЩшМЦЪЧЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЩшМЦ,жївЊЪЧЭЈЙ§вКбЙИзРДЧ§ЖЏСЌНгИЫЃЌЖјСЌНгИЫЪЧЫЕжїСЌИЫЙЬНгЃЌетбљОЭЕШгкЫЕПижЦСЫСЌИЫдкЩ§НЕЃЌЖјжїСЌИЫЪЧвЛЖЫЭЈЙ§ЙіТжжЇГХжїДѓМєЬЈвЛЖЫЪЧЭЈЙ§ЯњжсЙЬЖЈдкДѓМєЬЈЯТУцЃЌетбљОЭЭЌЪБДјЖЏСЫДѓМєЬЈЕФЩ§НЕЃЌЖјДѓМєЬЈЕФЩ§НЕааГЬгывКбЙИзЕФааГЬгажБНгЙиЯЕЁЃЮФеТжївЊНщЩмСЫЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЕФРраЭвдМАНсЙЙКЭвКбЙИзЕФбЁаЭМЦЫуЕШЕШЁЃГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГзїЮЊвКбЙПижЦЯЕЭГЕФвЛИіживЊзщГЩЕФВПЗжЃЌЫцЪБЪБДњЕФЗЂеЙКЭЙЄвЕЕФНјВНЃЌвКбЙЙЄвЕЖдЦфЬсГіСЫаТЕФвЊЧѓЁЃГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГдкЦћГЕЕФЮЌаоЗНУцЦ№зХживЊЕФзїгУЃЌЫќжБНггАЯьзХЦћГЕЮЌаоЕФЙЄзїаЇТЪКЭГЩБОЃЌвђДЫГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЕФЩшМЦЪЧЕБНёЛњаЕЙЄвЕЗЂеЙЕФБиШЛЧїЪЦЃЌдквдКѓЕФШєИЩФъРяЃЌвВЛсЦ№ЕНдНРДдНживЊЕФзїгУЁЃ
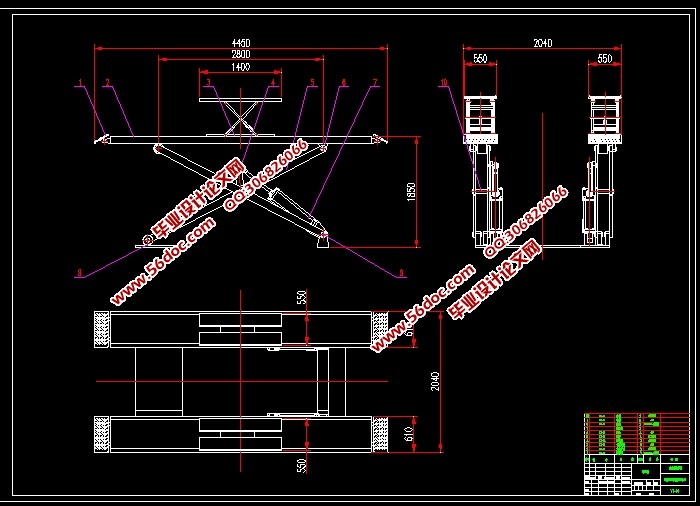
БОДЮЩшМЦЪЧЙигкГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЕФЩшМЦЃЌЭЈЙ§ЖдаТЪНЕФГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЕФНсЙЙКЭвКбЙЗНУцНјааДДаТЩшМЦЃЌЪЙЕУДЫжжРраЭЕФГЕгУЫФТжЖЈЮЛОйЩ§ЛњвКбЙПижЦЯЕЭГЕФЪЙгУЗЖЮЇИќЙуЗКЃЌдкЦћГЕЮЌаоСьгђвВЛсЦ№ЕНдНРДдНживЊЕФзїгУЁЃ
ЙиМќДЪЃКЩшМЦЃЛЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњЃЛвКбЙИзЃЛзїгУ
Abstract
For a lot of special places, like the risk is very big, or we are difficult to reach, such as disarm bombs, unknown corresponding domains such as detection, probing deep of more dangerous situation usually need to implement the robot.It’s a main part of robot for micro pedipulator, walking robots and more than six feet, compared to the Eight Legged Robot, because of strong bearing capacity, good stability, which the meritss is simple construction, So, a large number of researchers around the world, start .an important positionin national economy mould technology has also become to measure a national product manufacture level of important symbol.Injection molding plastic molding isan important method .it is mainly suitable for thermoplastic molding .and canbea complicated shape of precision plastic forming parts is the adsl surface hella a design model .
Its principle is diagonal synchronization, leg activity by the structure of the crank rocker, front leg movements around the same, it detailed performance curve characteristics of the connecting rod,when the curve trajectory diagonal straight line segment, the robot is stationary, the motion trajectory when the diagonal curve is slanting line do the walking.
KeywordsЃКManufacturing ,Location, Clamping, Process
ЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњЕФЙЄзїдРэ
ЕБД§аоРэЕФЦћГЕПЊЕНМьаоЬЈМмЩЯУцКѓЃЌГЪСНзщЖдГЦЗжВМЕФвКбЙИзПЊЪМЖЏзїЃЌдкСЌИЫЛњЙЙЕФзїгУЯТЃЌДјЖЏЦћГЕЛКЛКЩЯЩ§ЃЌЭЌЪБЩЯУцзАгааЁаЭЕФМєЪНЦНЬЈЃЌПЩвдАбЦћГЕЭаЦ№ИќИпЃЌДгЖјПЩвдЗНБуЮЌаоЙЄШЫЖдЦћГЕГЕТжЕФЮЌаоКЭИќЛЛЁЃ

ФП ТМ
еЊвЊ I
Abstract II
1в§бд 1
1.1БОПЮЬтбаОПЕФФкШн 1
1.2ЖЈЮЛОйЩ§ЛњЕФЗжРр 4
1.3вКбЙММЪѕдкОйЩ§ЛњЗНУцЕФЗЂеЙ 6
2ЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњзмЬхНсЙЙЕФЩшМЦ 7
2.1ЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњЕФзмЬхЗНАИЭМ 9
2.2ЦћГЕгУЫФТжЖЈЮЛОйЩ§ЛњЕФЙЄзїдРэ 10
3ЫФСЌИЫЛњЙЙЕФИЈжњЩшМЦ 10
3.1ЫФСЌИЫЛњЙЙЭМ 11
3.2ЫФСЌИЫЛњЙЙдЫЖЏбЇЗжЮі 12
3.3ЪмСІЗжЮі 12
3.4вКбЙЯЕЭГЕФЪ§бЇФЃаЭ 14
3.5ЗжЮіИпЖШЃЌЙЄзїдиКЩЃЌСїСПгыЪБМфЕФЙиЯЕ 16
4вКбЙЯЕЭГЕФЩшМЦ 18
4.1ШЗЖЈЯЕЭГЗНАИ 19
4.2ФтЖЈвКбЙЯЕЭГЭМ 21
5вКбЙИзЕФЩшМЦМЦЫу 22
5.1вКбЙИзЕФРраЭМАНсЙЙаЮЪН 23
5.2вКбЙИзЕФЙЄзїбЙСІ 24
5.3МЦЫувКбЙИзЕФГпДч 26
5.4вКбЙИзИїЙЄзїНзЖЮЕФбЙСІЁЂСїСПКЭЙІТЪМЦЫу 27
5.5вКбЙИзЙЄПіЭМ 28
5.6вКбЙИзЭЦСІЕФМЦЫу 30
5.7вКбЙЯЕЭГЕФбЙСІЫ№ЪЇМЦЫу 31
5.8ИзЭВЕФЩшМЦгыМЦЫу 32
5.9ИзЭВБкКёЕФбщЫу 33
НсТл 34
жТаЛ 35
ВЮПМЮФЯз 36
|
