Abstract
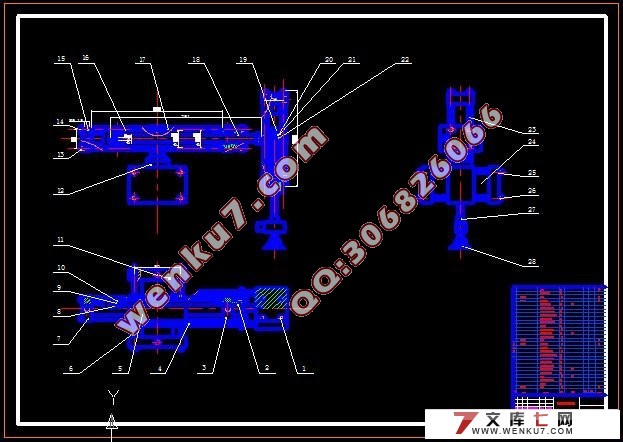
Industrial manipulator is in recent decades developed a kind of hing-tech automation production equipment.Production application manipulator can be used to increase the production level of automation and labor productivity, reduce labor intensity, assure product quality, achieve the safety in production.This design is aimed at the working characteristics of punch special manipulator design.For more impacting processing,so in this board piece in the design of manipulator hand adopting airflow suction cups institutions,convenient draw materials.The whole manipulator using cylindrical coordinates structure,with horizontal and vertical two arms.The air cylinder can rapidly push completion will draw to work position of workpiece action,improve work efficiency.
KeyWordsЃКpunching machine manipulator automation