еЊЁЁЁЁвЊ
ЛЈМќжсздЖЏЯпЪЧгЩШ§ЬЈЗТаЮГЕДВзщГЩЁЃСЯЕРЕФЗНЯђгыЛњДВжїжсЦНааЁЃЩЯСЯМАЯТСЯЗжБ№гаСНИіЛњаЕЪжРДЭъГЩЃЌЦфЛњЙЙЛљБОЯрЭЌЁЃЖдФъЩњВњИйСьЮЊ10ЭђМўЕФЛЈМќжсЃЌЦфМгЙЄЙЄвевЊЧѓдквЛЬЈЛњДВЩЯвЛДЮЭъГЩЛЈМќжсЕФЭтдВМгЙЄМАЛЈМќМгЙЄЁЃЕБздЖЏЛњДВЭъГЩЖдЙЄМўЕФЧаЯїМгЙЄвдКѓЃЌШєФмЩшМЦЛњаЕЪжздЖЏЭъГЩЙЄМўЩЯЯТСЯдЫЖЏЃЌЭЌЪБЭъГЩЙЄМўЕФЗзЊдЫЖЏЃЌдђПЩвдаЮГЩздЖЏЯпЖјДѓДѓЬсИпЙЄзїаЇТЪЁЃ
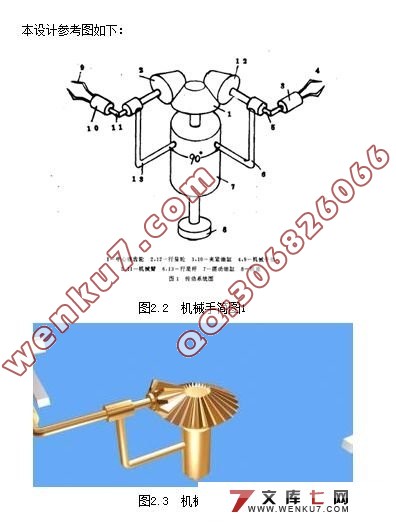
БОЩшМЦзХжиЬжТлСЫЛЈМќжсздЖЏЯпЩЯЃЌЯТСЯЛњаЕЪжЕФдЫЖЏЬиЕуЁЂЧ§ЖЏЗНЪНвдМАПижЦЗНЪНЃЌЮЊЛњаЕЪжЕФОпЬхНсЙЙЩшМЦЬсЙЉСЫРэТлвРОнЁЃЯжвдЯТСЯЛњаЕЪжЮЊР§ЃЌЯТСЯЛњаЕЪжЪЧАбвбМгЙЄКУЕФЙЄМўДгЛњДВЩЯШЁЯТЃЌзЊЫЭЕНЯТвЛИіЙЄЮЛЕФСЯЕРЩЯЁЃЛњаЕЪжЯЕгЩа§зЊгЭИзЁЂМаНєгЭИзЁЂзЖГнТжЕФаааЧЛњЙЙМАЪжзІзщГЩЁЃЛњаЕЪжЙВгаСНИіЖЏзїЃКЛњаЕЪжзЊБлЕФе§ЁЂЗДЛизЊдЫЖЏЃЛЪжзІЕФМаНєгыЗХЫЩдЫЖЏЁЃ
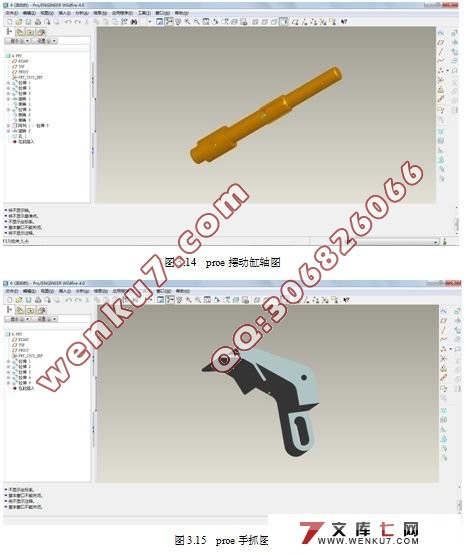
ЛњаЕЪжЛљБОВЮЪ§ЃКЪжБлЛизЊНЧЖШ90oЁЃЛњаЕЪжЕФЛизЊИзЕФзЊжсЭЈЙ§ЛЈМќДјЖЏЪжБлЛизЊЁЃгЩгкжааФзЖГнТжЙЬЖЈВЛЖЏЃЌаЁБлОЭДјЖЏаааЧзЖГнТжзіИДКЯдЫЖЏЃЈМДШЦжааФзЖГнТжЯпЙЋзЊЃЌгжШЦздЩэжсздзЊЃЉЁЃСНзЖГнТжЕФГнЪ§БШЮЊ2:1ЃЌЫљвдЕБДѓЪжБлзЊЙ§90o
ЪБЃЌаааЧзЖГнТжздзЊзЊЙ§180oЃЈМДЪжЭѓдЫЖЏЃЉЁЃМгГжЪНЪжВПМАМаНєгЭИззАдкЪжБлЩЯЃЌгЩЪжБлДјЖЏМгГжЪНЪжВПзпПеМфЧњЯпЙьМЃЃЌНЋЙЄМўзАЕНЛњДВЖЅМтДІЃЈЩЯСЯЃЉЃЌЛђДгЛњДВЖЅМтДІШЁЯТЙЄМўЫЭЕНСЯЕРЩЯШЅЃЈЯТСЯЃЉЁЃ
ЩњВњжаЃЌвЛЬЈЗТаЮГЕДВЪЙгУСНИіЭъШЋЯрЭЌЕФЛњаЕЪжЃЌЗжБ№зАЁЂаЖЙЄМўЃЌЖЏзїСщЛюПЩППЁЃ
ЙиМќДЪЃКЛњаЕЪж ЩшМЦ ЛњаЕЛиТЗ ЕчПиЛиТЗ
Abstract
By three spline automatic line is a parody of fractal lathe. The direction of the feeding word spindle parallel. On material anticipates two manipulator respectively, the agency to complete basic and same. Annual production program for 10 million pieces of spline shaft, its processing technology requirements in a machine last completed a circular spline processing and spline processing. When completed the automatic machine of workpiece machining later, if can design manipulator automatic completion of workpiece up-down material movement, finish at the same time, the flip of workpiece can form automatic line movement and greatly improving working efficiency.
This design emphasizes to discuss the material on spline automatic line, the motion characteristics, driven manipulators and control mode for the way of the manipulator, concrete structure design provides theory basis. Now the following materials for example, blanking robot manipulators is already processed to remove from machine workpiece, transferred to a location on the material under. Manipulator by rotating cylinder, of clamping cylinder, bevel gear planetary institutions and PAWS composition. Manipulator has two action: manipulator turn arm the positive and negative rotation movement; The PAWS clamping and relaxation exercises.
Manipulator basic parameters: the arm turning Angle 90o. Rotary cylinder shaft of the manipulator arm backwards. Driven by spline Because central bevel gear stationary, and forearm will drive the planet bevel gear do compound movement around the center line (i.e. revolution, and bevel gear around their axis). The two bevel gear ratios for 2:1, so when big turn 90o arm
, the planet rotate 180o (i.e. bevel gears turn wrist movements). The blessing type hand and clamping cylinder packed in the arm, driven by arm hand go add hold type space curve track, the workpiece was loaded to machine's top place (feeding), or take the top place from machine to material way up (workpiece material).
Production, a copy form lathe to use two identical manipulator, are installed, unloading workpieces, flexible motion and reliable.
Keywords: manipulator control circuit design mechanical loop
БОЦЊЩшМЦЕФЛњаЕЪжзлКЯКЭдЫгУСЫЛњаЕСуМўЁЂРэТлСІбЇЁЂВФСЯСІбЇЁЂЛњаЕдРэЁЂН№ЪєЙЄвебЇЁЂШШДІРэЁЂММЪѕВтСПЁЂЛњаЕжЦЭМЕШжЊЪЖЃЌЫќжївЊЪЧгІгУдкФЧаЉЕЅЕїЁЂЦЕЗБЕФВйзїжагУвдДњЬцШЫЕФРЭЖЏНјааЙЄзїЃЌЫќЕФжївЊгХЕуЪЧЃК
1. ЙЄзїЪБМфГжОУЃЌВЛЛсГіЯжШЫЕФЦЃРЭЃЌПЩвджиИДВЛЖЯЕФРЭЖЏЃЌЮЌГжСїЫЎЯпЕФе§ГЃЙЄзїЁЃ
2. ЖдЛЗОГЪЪгІадЧПЃЌПЩвддкЖрЗлГОЁЂвзШМЁЂвзБЌЁЂЗХЩфадЧПЕШЖёСгЛЗОГжаЙЄзїЁЃ
3. дЫЖЏОЋШЗЁЂСщЛюЁЂЬиБ№ЪЧдкМЦЫуЛњЕФПижЦЯТЃЌПЩвдДяЕНЗЧГЃИпЕФОЋЖШвЊЧѓЁЃ
4. ЭЈгУадКУЃЌГ§СЫЬиЖЈгУЭОЭтЃЌЪЪЕБИФБфЪжВПЃЌБуПЩвдЭъГЩХчЭПЁЂКИНгЕШЁЃ
5. ЙЄзїаЇТЪИпЃЌЬсИпРЭЖЏЩњВњТЪЕФЭЌЪБвВЬсИпСЫГЩБОЁЃ
БОЛњаЕЪжПЩвдИљОнашвЊМгЩЯаазпЛњЙЙЃЌвдБуЪЕЯждЖОрРыВйзїЁЃ
БОДЮЩшМЦЕФЛњаЕЪжЪЧвдPLCПижЦИівКбЙдЊМўРДЪЕЯжЛњаЕЪжИїЙиНкЕФдЫЖЏЁЃжСгкЛњаЕЪждкПеМфЕФдЫЖЏКЭЖЈЮЛдђгЩЭтВПЕФЕчФдВйзїЯЕЭГЭъГЩЃЌЫќжївЊЯШНјааЛњЦїЪжЕФдЫЖЏбЇЗжЮіЃЌЖЏСІбЇЗжЮіЃЌЙьМЃЙцЛЎКЭБрГЬЁЃДгЖјгЩЩЯЪіЯЕЭГЭъГЩећИіЛњаЕЪждкПеМфЕФаазпЃЌЖЈЮЛКЭжиИДЖЈЮЛЕШВйзїЁЃ
ЕчПиЯпТЗЭМШчЭМЫљЪОЃЌОпЬхЩшМЦДгТдЁЃ
2.2 ЙцИёВЮЪ§
ЙЄвЕЛњаЕЪжЕФЙцИёВЮЪ§ЪЧЫЕУїЛњаЕЪжЙцИёКЭадФмЕФОпЬхжИБъЃЌвЛАуАќРЈвдЯТМИИіЗНУцЃК
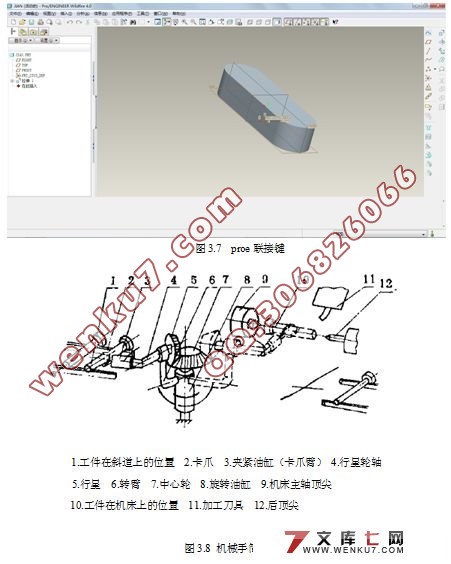
1.зЅжиЃЈгжГЦБлСІЃЉЃКЖюЖЈзЅШЁжиСПЛђГЦЖюЖЈИККЩЃЌЕЅЮЛЮЊЙЋНяЃЛ
2.здгЩЖШЪ§ФПКЭзјБъаЮЪНЃКећЛњЃЌЪжБлКЭЪжЭѓЕШдЫЖЏЙВгаМИИіздгЩЖШЃЌВЂЫЕУїзјБъаЮЪНЃЛ
3.ЖЈЮЛЗНЪНЃКЙЬЖЈЛњаЕЕВПщЃЌПЩЕїЛњаЕЕВПщЃЌааГЬПЊЙиЃЌЕчЮЛЦїМАЦфЫћИїжжЮЛжУЩшЖЈКЭМьВтзАжУЃЛ
4.Ч§ЖЏЗНЪНЃКЦјЖЏЃЌвКЖЏЃЌЕчЖЏКЭЛњаЕЪНЫФжжаЮЪНЃЛ
5.ЪжБлдЫЖЏВЮЪ§ЃЛ
6.ЪжЭѓдЫЖЏВЮЪ§ЃЛ
7.ЪжжИМаГжЗЖЮЇКЭЮеСІЃЛ
8.ЖЈЮЛОЋЖШЃКЮЛжУЩшЖЈОЋЖШКЭжиИДЖЈЮЛОЋЖШЃЛ
9.ТжРЊГпДчЃКГЄ×Пэ×ИпЃЈКСУзЃЉЃЛ
10.жиСПЃКећЛњжиСПЁЃ
2.3 ЩшМЦТЗЯпгыЗНАИ
2.3.1 ЩшМЦВНжш
1.ВщдФЯрЙизЪСЯЃЛ
2.ШЗЖЈбаОПММЪѕТЗЯпгыЗНАИЙЙЫМЃЛ
3.НсЙЙКЭдЫЖЏбЇЗжЮіЃЛ
4.ИљОнЫљИјММЪѕВЮЪ§НјааМЦЫуЃЛ
5.АДЫљИјЙцИёЃЌЗЖЮЇЃЌадФмНјааЗжЮіЃЌЧПЖШКЭдЫЖЏбЇаЃКЫЃЛ
6.ЛцжЦЙЄзїзАХфЭМВнЭМЃЛ
7.ЛцжЦзмЭММАСуМўЭМЕШЃЛ
8.змНсЮЪЬтНјааЗжЮіКЭНтОіЁЃ




ФПЁЁЁЁТМ 15000зж
еЊЁЁЁЁвЊ I
Abstract II
ФПЁЁЁЁТМ III
Ек1еТ аї Тл 1
1.1 ЙЄвЕЛњаЕЪжИХПі 1
1.2 ЙЄвЕЛњаЕЪжЕФЗжРр 3
1.3 ЙЄвЕЛњаЕЪждкЙЄвЕЩњВњжаЕФгІгУ 4
1. 4ЛњаЕЪжЕФЗЂеЙЧїЪЦ 5
1.5 БОеТаЁНс 6
Ек2еТ ЙЄвЕЛњаЕЪжЕФЩшМЦЗНАИ 7
2.1 ЙЄвЕЛњаЕЪжЕФзщГЩ 7
2.2 ЙцИёВЮЪ§ 8
2.3 ЩшМЦТЗЯпгыЗНАИ 8
2.3.1 ЩшМЦВНжш 8
2.3.2 баОПЗНЗЈКЭДыЪЉ 9
Ек3еТ ЛњаЕЪжИїВПЗжЕФМЦЫугыЗжЮі 10
3.1 ЪжВПМЦЫугыЗжЮі 10
3.1.1 ЛЌВлИмИЫЪНЪжВПЩшМЦЕФЛљБОвЊЧѓ 10
3.1.2 ЪжВПЕФМЦЫуКЭЗжЮі 10
3.1.4 гЭИзЖЫИЧЕФСЌНгЗНЪНМАЧПЖШМЦЫу 16
3.2 ЭѓВПЃЈаЁБлЃЉМЦЫугыЗжЮі 18
3.2.1 ЭѓВПЩшМЦЕФЛљБОвЊЧѓ 18
3.2.2 ЭѓВПЛизЊСІОиЕФМЦЫу 18
3.2.4 бЁМќВЂаЃКЫЧПЖШ 21
3.3 БлВПЃЈДѓБлЃЉМЦЫугыЗжЮі 21
3.3.1 БлВПЩшМЦЕФЛљБОвЊЧѓ 21
3.3.2 ЪжБлЕФЩшМЦМЦЫу 25
3.4 ЛњЩэ 33
3.5БОеТаЁНс 33
Ек4еТ вКбЙЯЕЭГ 34
4.1 вКбЙЛиТЗЯЕЭГЕФЩшМЦ 34
4.2 БОеТаЁНс 35
Ек5еТ вКбЙИзЕФБЃбјгыЮЌао 36
5.1 вКбЙдЊМўЕФАВзА 36
5.2 вКбЙЯЕЭГЕФвЛАуЪЙгУгыЮЌЛЄ 36
5.3 вЛАуММЪѕАВШЋЪТЯю 37
Ек6еТ ЛњаЕЪжПижЦЯЕЭГ 38
6.1 ЕчПизДЬЌЯТЛњаЕЪждЫЖЏЗжЮі 39
Нс Тл 40
ВЮПМЮФЯз 41
жТ аЛ 42
|