液压控制的翻转机械手的设计
来源:wenku7.com 资料编号:WK74153 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK74153
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
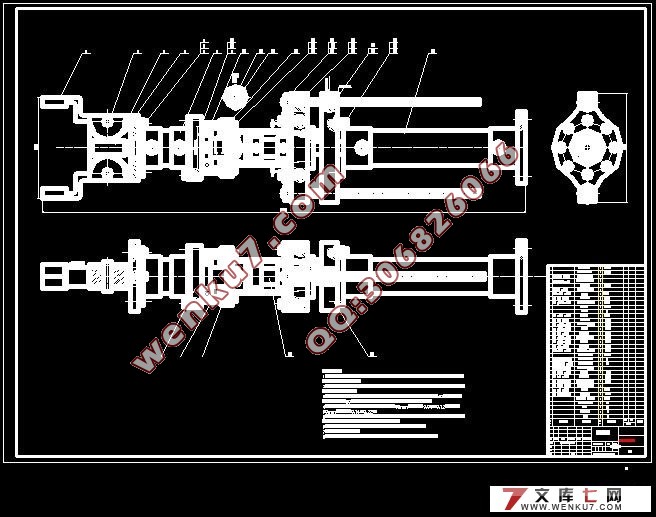
液压控制的翻转机械手的设计(含选题审批表,任务书,开题报告,中期检查表,论文说明书15000字,CAD图纸7张合一)
摘要:当今世界许多发达国家高度重视机器人技术的研究,各种用途的机器人越来越多的用于科学研究、现代化工业生产和工业作业当中。机械手是机器人的操作机,是机器人完成各种任务的执行机构。本文主要针对生产线上的自动化设计了一个两自由度的专用翻转机械手,以实现工厂的自动化,减轻了工人劳动强度,提高了劳动生产率。该机械手采用液压驱动,实现了夹紧、垂直移动和展开等动作。为了实现这些动作,采用了部件设计以分别实现动作要求。
关键词:液压驱动;翻转;机械手
The Design Of Turning Manipulator Based On Hydrautic Control
Abstract: In today's world, many developed countries have been attaching great importance to the study of robotics, meanwhile, more and more robots of various uses have been used in scientific study, modernized industrial production and industrial operations. Robot manipulator is the operator who directs the robot in completing various tasks. This paper, according to the automation of production lines, it aim to develop the design of a dedicated flip with two degrees of freedom manipulator to achieve the goals of factory automation, reducing the labor intensity of workers and improved labor productivity. The use of hydraulic-driven robot has done successfully in clamping, such as vertical movement and action to start. In order to achieve these movements, the author adapts the design of the components to achieve the action requested.
Key words: hydraulic drive; flip; Manipulator
目 录
1 绪论………………………………………………………………………………1
1.1 前言………………………………………………………………………1
1.2 工业机械手在生产中的应用……………………………………………3
1.3 机械手的组成………………………………………………………………4
1.3.1执行机构……………………………………………………………4
1.3.2驱动机构……………………………………………………………5
1.3.3控制系统分类………………………………………………………5
2 总体布局设计方案…………………………………………………………………5
2.1 机械手的确定………………………………………………………………5
2.2驱动机构的选择……………………………………………………6
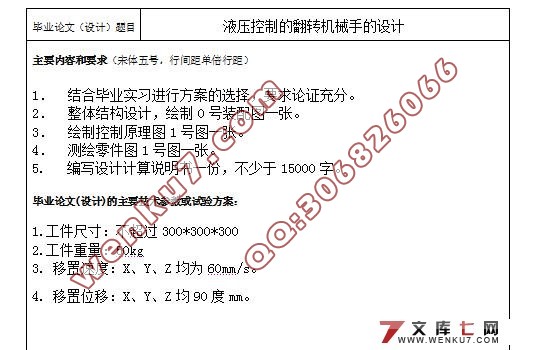
2.3 机械手的技术参数列表…………………………………………………7
3 机械手手部的设计计算……………………………………………………………7
3.1 手部设计时应注意的问题…………………………………………………7
3.2 典型的手部结构……………………………………………………………7
3.3 机械手手部结构及驱动的设计计算………………………………………8
3.3.1选择手部的类型及夹紧装置………………………………………8
3.3.2手指夹紧力及液压缸驱动力的计算液压缸的选用………………8
3.4 机械手手指部的设计计算………………………………………………10
3.4.1齿轮齿条传动机构的设计计算…………………………………10
3.4.2手指指部的设计计算……………………………………………14
3.4.3手指指部齿轮安装销的设计计算………………………………14
4 机械手腕部的设计计算…………………………………………………………14
4.1 机械手腕部结构及运动分析……………………………………………14
4.2 机械手腕部驱动装置的设计计算及选用………………………………14
5 机械手臂部的设计及有关计算…………………………………………………16
5.1 臂部设计时应注意的问题………………………………………………16
5.2 手臂的典型结构以及结构的选择………………………………………16
5.3 手臂Z方向升降运动的受力分析及其计算……………………………17
5.4手臂Z方向升降运动液压缸结构尺寸的设计计算及选用……………19
6 机身的设计…………………………………………………………………20
6.1 机身的概述……………………………………………………………20
6.2 机身设计时应注意的问题……………………………………………21
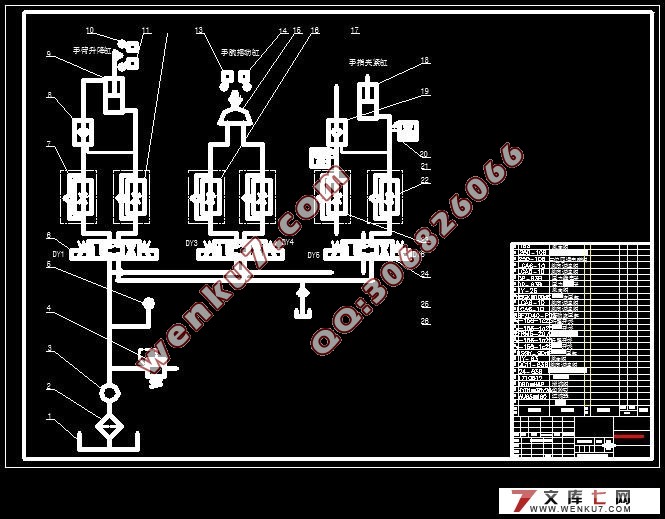
7 液压元件及动力机的设计选择………………………………………………21
7.1 液压泵的选择……………………………………………………………22
7.2动力机选择……………………………………………………………22
7.3 油管的设计………………………………………………………………22
7.4 油箱的设计………………………………………………………………22
7.5 液压元件的选择…………………………………………………………22
7.6 液压油的选用…………………………………………………………24
8 液压系统的验算………………………………………………………………25
8.1 压力损失的验算…………………………………………………………25
8.1.1回路压力损失的验算……………………………………………25
8.1.2局部压力损失验算……………………………………………26
8.2 计算液压系统的发热温升………………………………………………26
9 液压系统工作过程简述………………………………………………………27
结束语…………………………………………………………………………28
参考文献 ……………………………………………………………………………28
致谢 …………………………………………………………………………………29
附件 …………………………………………………………………………………30
|