注塑机取件机械手的设计
来源:wenku7.com 资料编号:WK74142 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK74142
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
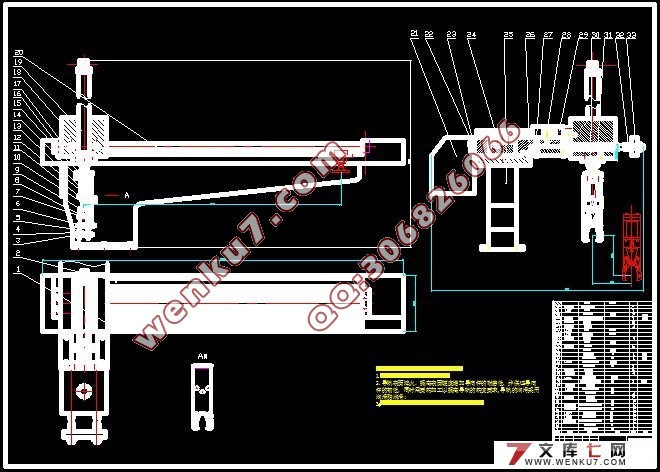
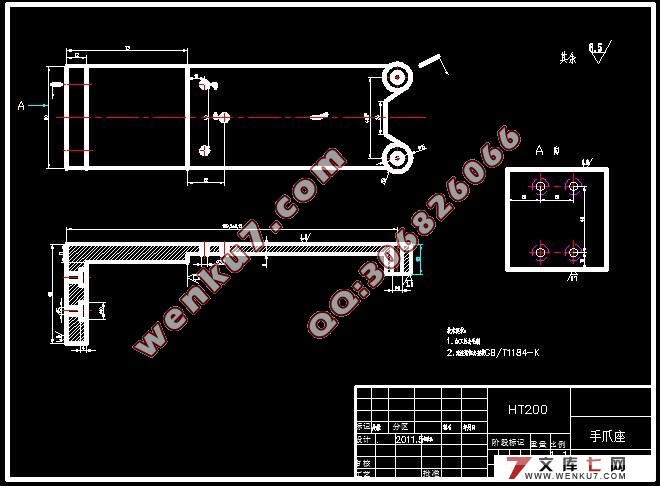
注塑机取件机械手的设计(含选题审批表,任务书,开题报告,中期检查表,论文说明书11800字,CAD图纸12张)
摘 要:在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运、取件以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文将设计一台三自由度的工业机器人,用于给注塑机取出成品。
关键词:机器人;气缸;注塑机;结构设计
Design of Manipulator for Injection
Abstract : In order to enhance the efficiency of production and guarantee the quality of products,more attention has been paid to the automation in the process of production in the modern manufacturing industry with large scale.Therefore,industrial robots are gradually appproved and adopted by enterprises as an important part in the automation production line.To some extent,the technical level and application of industrial robots have reflected on the automation level in national industries.At present,they mainly undertake such jobs mostly in playback way as welding,spraying,transporting taking and stowing,which are usually done repeatedly with high work strength.
In the thesis,an industrial robot with three DOFS will be designed to remove the finished molding machine.
Key words: android;cylinder;injection machine;structural design


|