���������˻�еϵͳ�����(������,���ⱨ��,���ķ���,��ҵ����˵����12000��,���ȼ���,CADͼֽ5��)
ժ Ҫ
�ڵ�����ģ����ҵ�У���ҵΪ�������Ч�ʣ����ϲ�Ʒ�������ձ������������̵��Զ����̶ȣ���е����Ϊ�Զ����������ϵ���Ҫ��Ա������ҵ����ͬ�����á���е�ֵļ���ˮƽ��Ӧ�ó̶���һ���̶��Ϸ�ӳ��һ�����ҹ�ҵ�Զ�����ˮƽ��Ŀǰ����е����Ҫ�е��ź��ӡ���Ϳ�������Լ��Ѷ���ظ��Բ����Ͷ�ǿ�ȼ���Ĺ�����������ʽһ���ȡʾ�����ֵķ�ʽ��
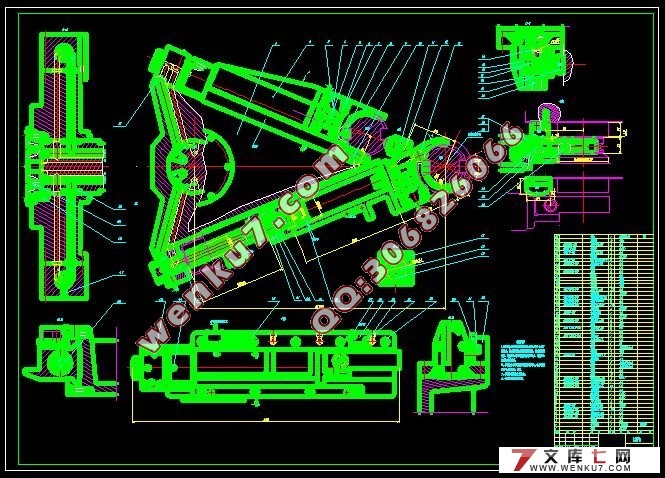
���Ľ����һ̨�����ɶȵĻ�е�֣���Ҫ�Ĺ��þ����Զ���������Ҫ��ʵ�ּӹ������Զ�����ϵͳ����ơ�ͨ�������ӹ����ĵ�����ṹ���Զ�����ϵͳ���ص㡢Ӧ�����������Ҫ��ȣ�����������ػ����϶Ե���ͻ�����е�ֵ���Ҫ——�������س���Ŀ���������ʵ�ֻ������̡�����Ϊ��ʽ����ʽ���⡣����װ�ò��õ��Һѹ��������ƵĻ�����е��Ϊ��תʽ����˫�ֻ�е�֣���ָ���õ�����ѹ��ʽ������װ�ò���Һѹ˫���øס����ݻ�е�ֺ͵���λ�õ���Ҫ����ƻ�е���ڻ��������ƶ�װ�ã���ʵ�ֶ��ŵ����ϵĵ��������ϵĵ�֮��Ľ�������Ϲ���ʵ�ʣ����Զ�����ϵͳ�����صĿ�������������ɻ�������ʡ��ʱ�䡢�����Ч�ʡ���ȫ�ɿ���
�ؼ��� ����е�֣��ӹ����ģ����⣻�Զ�����
Abstract
In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the, application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc, which are usually done repeatedly and take high work strength, and most of these robots work in playback way.
In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. The subject is to design numerically controlled tool-changing manipulator and numerically controlled tool-magazine. In this progress, the project synthesizes the characteristic and utility condition of numerically controlled tool-changing manipulator and numerically controlled tool-magazine . Numerically controlled tool-changing manipulator adopts rotary single arm and spring pin numerically controlled tool-magazine adopts vertical tool-magazine . Driving gear uses hydraulic cylinder .in a word ,the tool-magazine and the manipulator can do efficiently .reliably and quickly.
Key word : Tool-changing manipulator; Machining Center; Tool-magazine; Automatic Tool Changer
1.1.2�����Ŀ��
ͨ����ҵ��ƵĶ�����ѧ���ۺ�������ѧ��֪ʶ�ͼ��ܽ���ʵ�ʹ�������ķ������ۺϼ���ơ����������о����������������Ķ������������ն����붨�����ϵĶ����о�����֤������������������ơ����㼰��ͼ�������������������ͷ��������������д���˵����ģ���������Ƴ��Ϻ�ʵ��Ҫ����Զ����������˻�еϵͳ��
1.1.3�о���Χ��Ҫ�ﵽ�ļ���Ҫ��
��;���ڸ����ij���ָ���£���ϵ������ʽ��ϳ�������������ʵ�����мӹ�������Զ�װ��ж��[2]��
����Ҫ��
�ṹ��ʽ�� Բ�����ꣻ
���ɶ����� 4��
���������� 10kg����צ����
ĩ�˲������� ˫��צ��
�����ռ䣺 ����0.195m������0.18m������1.22m����ת180°��
�����ٶȣ� �嵵�ɵ���
��������ٶȣ� ����20m/min,����16m/min,����8m/min,��ת16rpm;
�ظ���λ���ȣ� ±0.6m��
���䵶λ���� ��С��170�ѣ�����չ��
�������� �R600kg��
Ŀ ¼
ժ Ҫ III
Abstract IV
Ŀ ¼ V
1 ���� 1
1.1��������塢Ŀ�ġ��о���Χ��Ҫ�ﵽ�ļ���Ҫ�� 1
1.1.1��������� 1
1.1.2�����Ŀ�� 1
1.1.3�о���Χ��Ҫ�ﵽ�ļ���Ҫ�� 1
1.2�����ڹ�����ķ�չ�ſ������ڵ����� 2
1.2.1���ڵķ�չ�ſ� 2
1.2.2����ķ�չ�ſ� 3
1.2.3���ڵ����� 7
2 ����������������� 9
2.1 ��Ҫ�������������γߴ� 9
2.1.1 ��Ҫ�������� 9
2.1.2 ���γߴ� 9
2.2 �������������岼����� 10
2.2.1 �Զ����������˵���ɼ����� 10
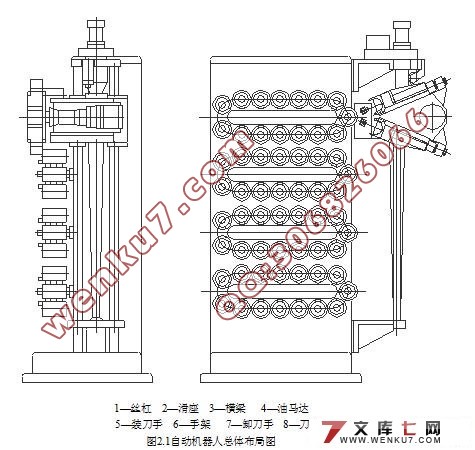
2.2.2 �Զ����������˵����岼��ͼ 10
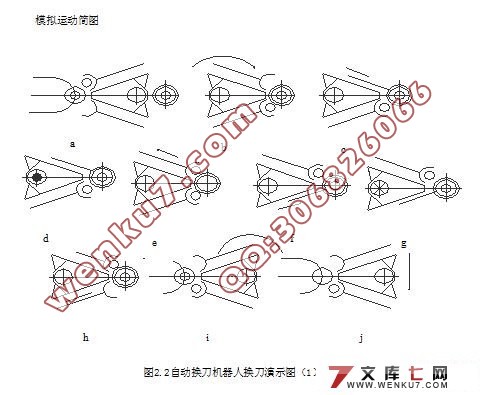
2.3 �����������Զ��������� 11
3 �����������ֲ���� 15
3.1 �ֲ��Ļ����ṹ����ɲ��ֺͶ���ԭ�� 15
3.1.1 ��е�ֵļ�� 15
3.1.2 ������е�ֵĽṹ������붯��ԭ�� 15
3.2 �ֲ�װ�õ�ѡ������� 18
3.2.1 ��ָ����� 18
3.2.2 �ֱ����������� 21
��4���Զ������������ֲ�������������� 27
4.1�Զ������������ֲ�������������ɼ�����ԭ�� 27
4.2����˿�ܼ���ĸ���������ѡ�� 28
4.3����˿����ĸ��֧�ŷ�ʽ����е�ѡ�� 31
4.4���ٳ��ֵ���� 33
4.5���ٳ��������� 36
4.5.1���ٳ��������� 36
4.5.2 ���ٳ������У�� 37
4.6����Һѹ�õ����ѡ�� 38
5 ������չ�� 39
5.1���� 39
5.2����֮���Լ�δ��չ�� 40
�� л 41
����� 42
|
