气动四自由度机械手结构设计
来源:wenku7.com 资料编号:WK73981 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK73981
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
气动四自由度机械手结构设计(任务书,设计说明书18000字,CAD图纸3张)
摘 要
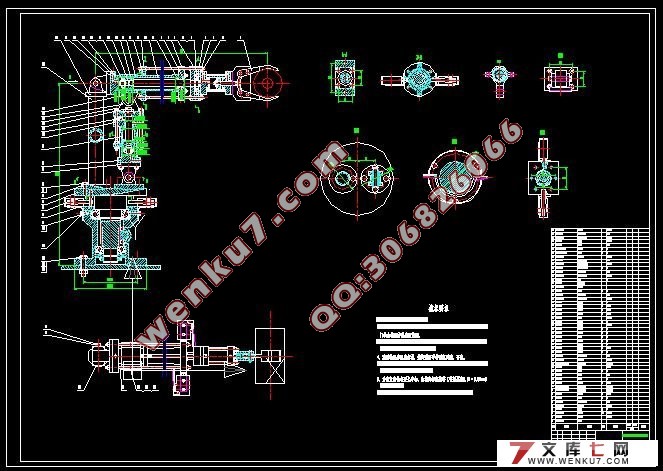
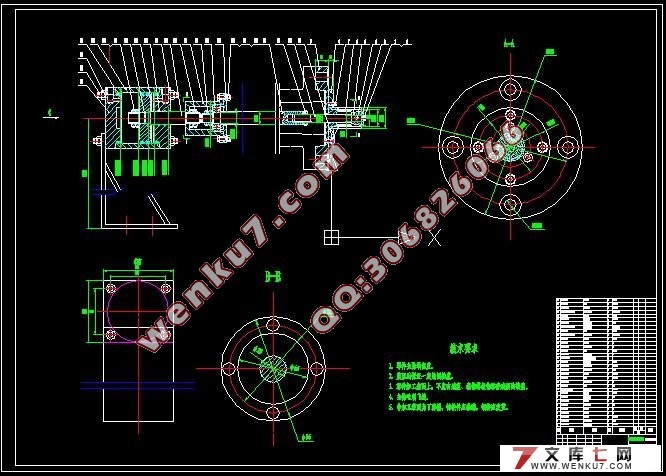
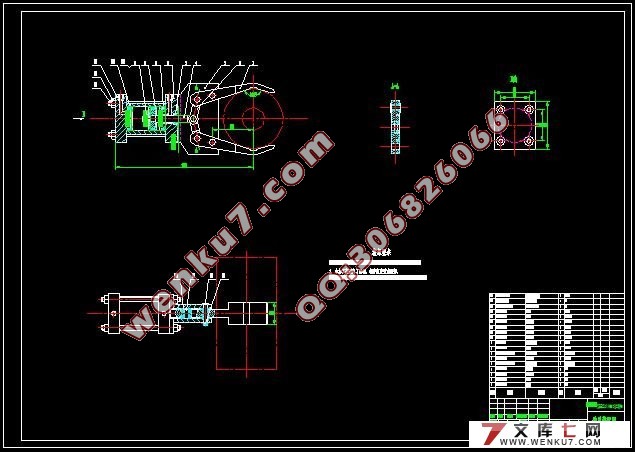
针对数控车床设计的一种套类零件自动上下料机构,实现了坯料的抓取、自动定位、夹紧以及工件的回放。该机构主要由自动安装夹具,坯料、工件拾取机械手,动力及控制系统组成。零件的自动定位、夹紧由弹簧涨胎心轴实现,涨胎心轴是以工件的内孔表面定位,由气缸驱动弹性筒夹向外扩涨,实现工件的定位和夹紧的。坯料、工件的拾取、回放是由单臂形式的机械手通过伸缩、旋转以及俯仰等运动实现的,这些运动均由气缸驱动获得。
本设计中,为实现工件的自动上下料,单臂机械手的运动与涨胎心轴的张合需进行紧密配合。考虑到所夹持工件的实际尺寸、质量等因素,本机构采用气动夹具、电气控制实现了坯料和工件的拾取、安装、回放过程的自动完成。
本文对气动机械手进行总体方案设计,确定了机械手的坐标形式和自由度。同时,设计了机械手的夹持式手部结构。
关键词: 自动上下料;气动机械手;气动夹具;套类零件
Abstract
This paper is aimed at designing a sleeve parts automatic baiting agencies for a CNC lathe.Its function is processing the crawls, automatic positioning and clamping of the workpiece.The automatic baiting agencies mainly consist of the automatic fixture, the manipulator for picking up the workpiece and billets and the drive and control system.Among them,the automatic positioning and clamping of the sets parts is achieved by the axis fetal heart rate rising to the workpiece centering hole.When clamping the workpiece,flexible tube folder can center and clamp the cylindrical hole through the expansion and inflation;blank grasping of the workpiece and the intervals are achieved by the manipulator arm by stretching and rotating.In the issue,it is necessary for the movements of the manipulator arm and the automatical fixture Zhang to require the coordination.Taking into account that the actual workpiece size,the quality and the various features of the driven approach to the system,we decide to adopt the aerodynamic control,using compressed air to achieve the movements of the clamping fixture and manipulator.
Keywords:Automatic baiting;Pneumatic manipulator;Pneumatic fixture;sleeve parts
功能分析
技术系统是由构造体系和功能体系构成的。建立构造体系是为了实现功能要求。对技术系统从功能体系入手进行分析,有利于摆脱现有结构的束缚,形成新的更好的方案。功能分析的目标是通过分析,建立对象系统的功能结构,通过局部功能的联系,实现系统的总功能。功能分析过程是设计人员初步酝酿功能原理设计方案的过程。这个过程往往不是一次能够完成的,而是随着设计工作的深入进行不断修改、完善。
功能原理设计
此阶段的落脚点是为不同的功能、不同的工作原理、不同的运动规律匹配不同的结构,这就是通常所说的型、数综合,而且通过上述的排列组合,会出现非常多的功能原理解,产生很多的运动方案,这就为优选方案提供了基础。

目 录
摘要 I
Abstract II
第1章 概述 1
1.1 气动四自由度机械手结构设计的背景与目的 1
1.1.1 数控机床 1
1.2 气动四自由度机械手结构设计的意义 4
第2章 总体方案设计 5
2.1 方案设计概述 5
2.1.1 方案设计 5
2.1.1.1 明确设计要求 5
2.1.1.2 功能分析 5
2.1.1.3 功能原理设计 5
2.1.2 技术设计 5
2.1.2.1 确定基本技术参数 6
2.1.2.2 机械结构设计 6
2.2 驱动方式的确定 6
2.2.1 电动机驱动 7
2.2.2 气压驱动 7
2.3 本章小结 9
第3章 气缸夹紧设计 10
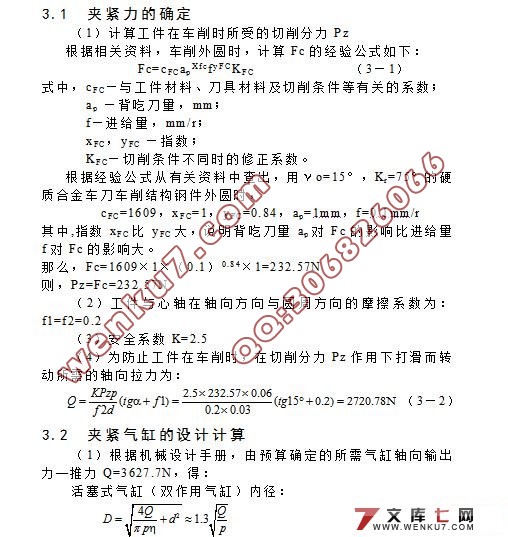
3.1 夹紧力的确定 10
3.2 夹紧气缸的设计计算 10
3.3 本章小结 12
第4章 机械手设计 14
4.1 运动分析 14
4.2 结构设计 16
4.2.1 手部设计 16
4.2.1.1 概述 16
4.2.1.2 机械式手抓设计 16
4.2.1.3 夹紧气缸的设计计算 17
4.2.2 臂部设计 19
4.2.2.1 臂部设计的基本要求 19
4.2.2.2 手臂直线运动机构 20
4.2.2.3 手臂伸缩运动气缸的设计计算 20
4.2.3 机身设计 22
4.2.3.1 概述 22
4.2.3.2 臂部俯仰运动气缸的设计计算 23
4.2.3.3 回转运动气动装置的设计计算 25
4.3 本章小结 27
结 论 28
致 谢 29
附录1 32
附录2 34
|
