基于SolidWorks四足行走机构的虚拟设计及动画模拟计
来源:wenku7.com 资料编号:WK73971 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK73971
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于SolidWorks四足行走机构的虚拟设计及动画模拟计(任务书,开题报告,中期检查报告,设计说明书14000字,CAD图纸1张,SolidWorks,答辩PPT)
摘要
本文根据目前国内外行走机构的研究现状,提出一种四足行走机构的设计与动画模拟。按照预定的轨迹,设计单条腿,并建立单条腿机构的数学模型,编排程序利用该数学模型对腿机构进行优化,并在此基础上进行了运动特性分析,同时运用MATLAB对尺寸进行了校核,选择了一种步态,并对步态进行了分析,使得四条腿能够运作协调,带动机体行走;在此设计过程中,综合运用了 Solid Works 软件进行辅助设计,并对该行走机构进行了干涉检查和运动模拟。
关键词:行走机构,步态,动画仿真
Abstract
According to the present research situation, this thesis brings forward design and simulation of a four-leg stepped mechanism. It designs the single leg, sets up the mathematical model of the single leg and builds the program to optimize the mechanism. It analyses the motion character. At the same time, it revises the measure with the MATLAB. It selects and analyses the pace to harmonize four legs and to drive the stepped mechanism. At the course of the design, it makes use of Solid Works to have aided design, interference examination and motion simulation.
Key words: stepped mechanism, pace, simulation
论文的主要研究内容
理论分析与推导计算
1.单腿的分析
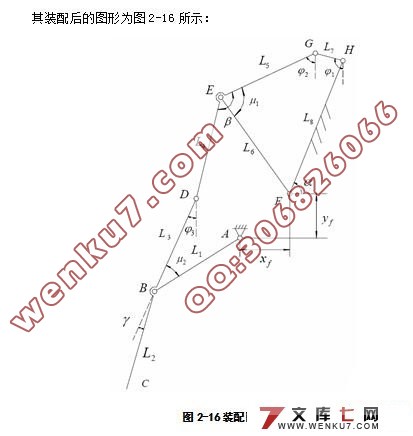
依据几何图形的封闭型条件,得出数学模型,根据数学模型,求出机构尺寸优化的目标函数。应用向量分析法,写出行走机构的足端轨迹的向量方程,并对该向量进行求导,得出足端的运动形式。这就有助于后来的MATLAB编程分析其运动。
2.四腿的组合
行走机构步态的选择和设计,以及转向方案的选择及确定。
3.行走机构设计
求解出该行走机构行走过程中重心的波动量。
4.利用SolidWorks里面的插件进行仿真运动并做出动画。
目录
摘要 Ⅰ
ABSTRACT Ⅱ
第一章 绪论 1
1.1课题研究的意义 1
1.2行走机构研究的历史与现状 2
1.3 研究行走机构的目的和方法 4
1.4论文的主要研究内容 4
第二章 四足行走机构的研究 5
2.1 行走机构的分类 5
2.2.1腿的配置形式 5
2.2.2腿的步态分析 6
2.3 行走机构腿的设计 9
2.3.1 行走机构腿的机构分析 10
2.4 行走机构单条腿尺寸优化 16
2.4.1数学模型 16
2.4.2优化方法及结果 18
2.4.3运动特征的分析 18
2.5行走机构足端的轨迹和运动分析 19
2.5.1行走机构足端的轨迹分析 19
2.5.2行走机构足端的运动分析 21
第三章 行走机构设计 23
3.1行走机构设计 23
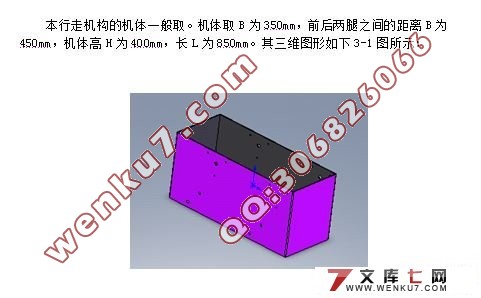
3.1.1机体设计 23
3.1.2、传动系统设计 24
3.1.3转向实现与控制 26
3.2利用Solid Works进行行走机构辅助设计 28
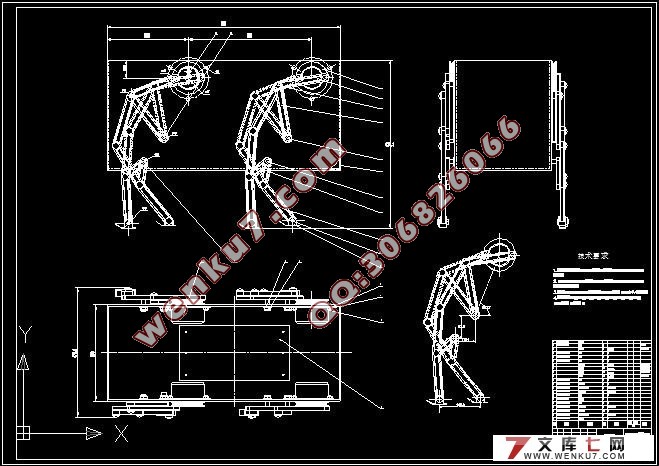
3.2.1基于Solid Works的行走机构图形绘制 28
3.2.2干涉检查及运动模拟 28
3.3行走机构稳定性研究 29
第四章 结论与建议 30
4.1论文完成的主要内容 30
4.2结论 30
参考文献 31
致谢 33
|