ТжЪНжЧФмвЦЖЏЛњЦїШЫ(бАМЃБмеЯаЁГЕ)ЕФЩшМЦ(КЌCADЭМ,SolidWorksШ§ЮЌЭМ)Ёя
РДдДЃКwenku7.com зЪСЯБрКХЃКWK717897 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK717897
вдЯТЪЧзЪСЯНщЩм,ШчашвЊЭъећЕФЧыГфжЕЯТдиЁЃ
1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ТжЪНжЧФмвЦЖЏЛњЦїШЫ(бАМЃБмеЯаЁГЕ)ЕФЩшМЦ(КЌCADЭМ,SolidWorksШ§ЮЌЭМ)Ёя(ТлЮФЫЕУїЪщ26000зж,ЭтЮФЗвы,CADЭМ13еХ,SolidWorksШ§ЮЌЭМ,дРэЭМ,ДњТы)
еЊЁЁвЊ
бМЃБмеЯаЁГЕЪЧаазпЛњЦїШЫЕФвЛжжЃЌ етжжаЁГЕПЩвдЪЪгІВЛЭЌЛЗОГЃЌ ВЛЪмЮТЖШЁЂЪЊЖШЁЂДХГЁЗјЩфЁЂжиСІЕШЬѕМўЕФгАЯьЃЌдкШЫРрЮоЗЈНјШыЛђЩњДцЕФЛЗОГжаЭъГЩШЫРрЮоЗЈЭъГЩЕФЬНВтШЮЮёЃЌЪЪгУгкЙњЗРМАУёгУЕШЖрИіСьгђЁЃ
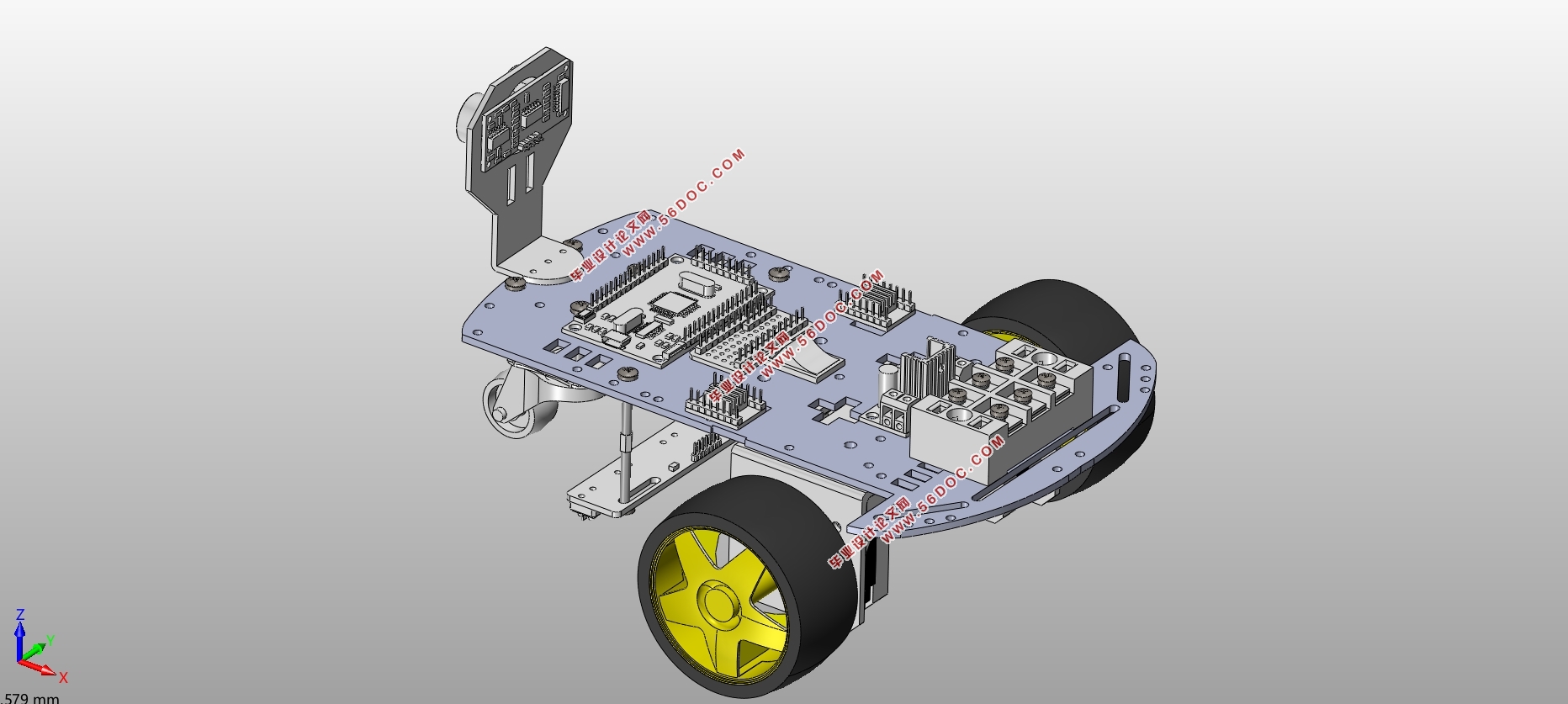
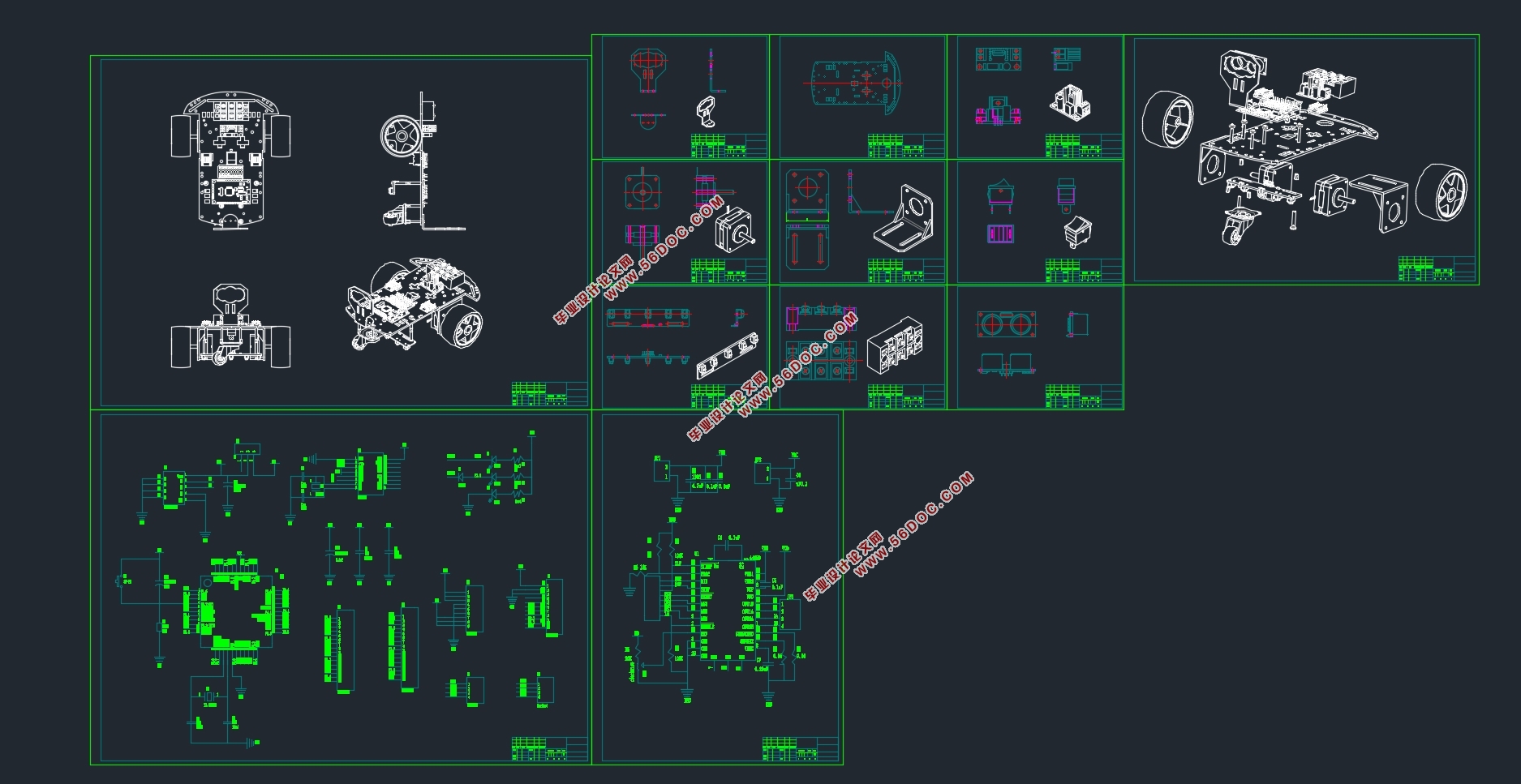
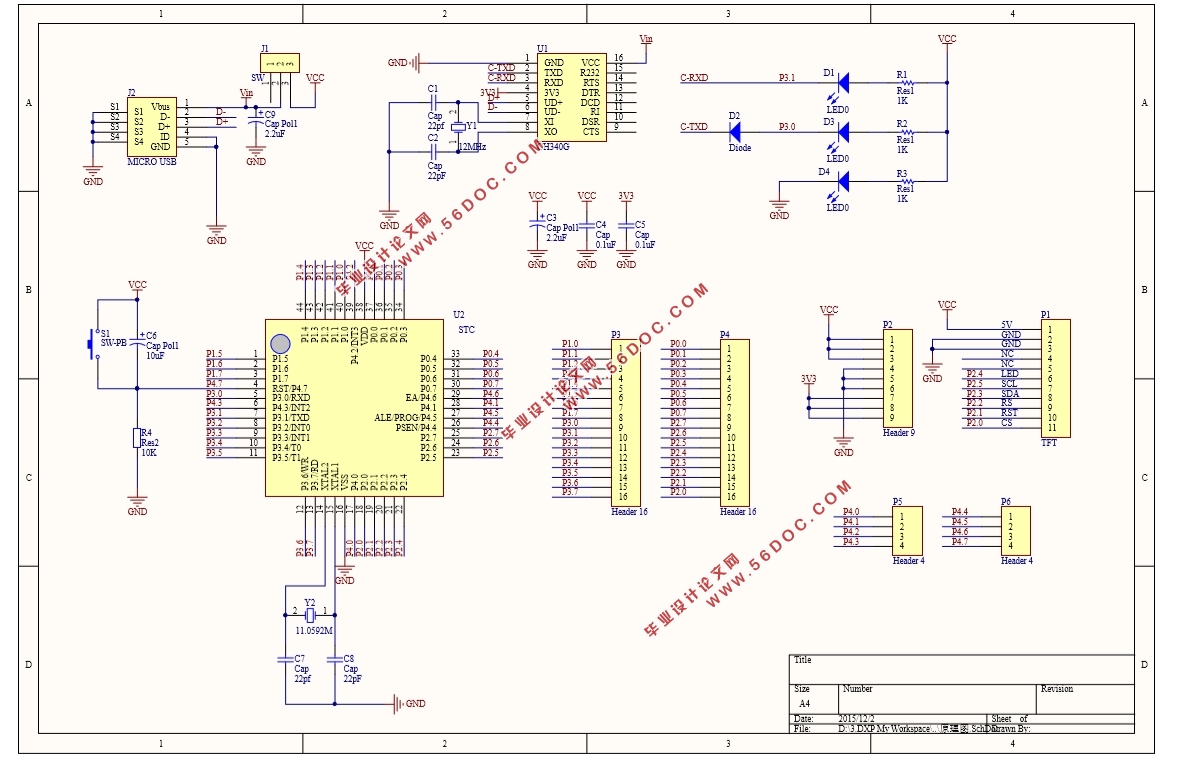
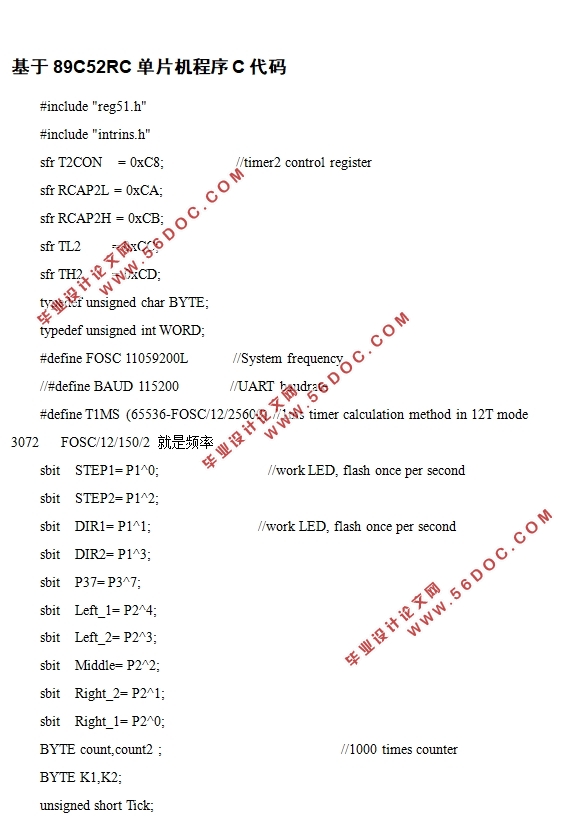
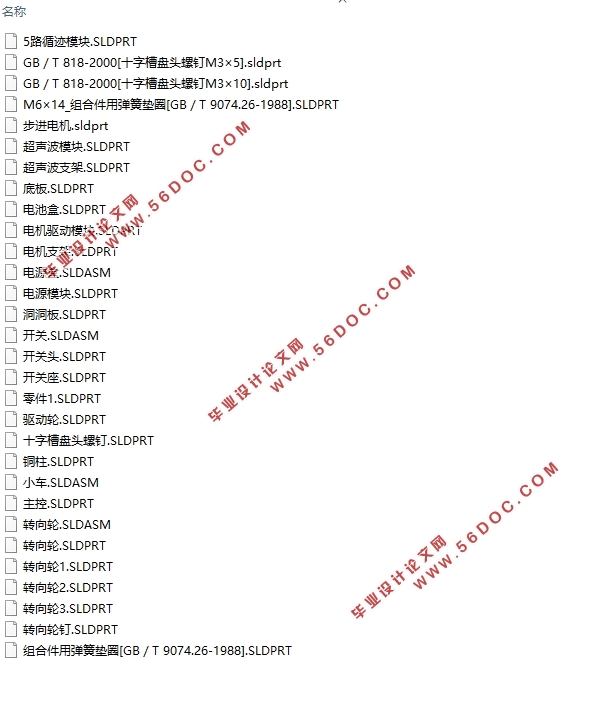
БОПЮЬтвЊЧѓВЩгУздааЩшМЦжЦзїЕФТжЪНжЧФмвЦЖЏЛњЦїШЫЪЕЯжзджїБмеЯВтОргыбВЯпЙІФмЁЃжївЊШЮЮёЪЧЩшМЦКЭЪЕЯжЛљгк 89C52RCЕЅЦЌЛњЕФбАМЃБмеЯаЁГЕЃЌАќРЈгВМўКЭШэМўСНИіВПЗжЁЃгВМўЕчТЗВПЗжжївЊАќРЈПижЦЦїЁЂбМЃЕчТЗЁЂБмеЯЕчТЗЁЂЕчЛњЧ§ЖЏЕчТЗЕШЁЃдкТжЪНжЧФмвЦЖЏЛњЦїШЫЕРТЗаХЯЂВЩМЏЗНУцЃЌБОЮФВЩгУЛњЦїШЫЪЕбщЪвЬсЙЉЕФSRF04ГЌЩљВЈВтОрДЋИаЦїЁЂ TCRT5000 КьЭтЯпДЋИаЦїзїЮЊБмеЯДЋИаЦїКЭбВЯпДЋИаЦїЁЃБОПЮЬтВЩгУ51ЯЕСаЕЅЦЌЛњжаЕФ89C52RCЕЅЦЌЛњзїЮЊжїПижЦаОЦЌВЂХфгазмЕчбЙЮЊ12VШнСПЮЊ1800mAЕФГфЕчяЎЕчГиМАЦфЯргІЮШбЙЕчТЗРДЮЊТжЪНвЦЖЏЛњЦїШЫЬсЙЉФмСПЁЃдкШэМўБрГЬЗНУцЃЌБОЮФЪЙгУCгябддкKEIL4.0БрвыШэМўЩЯНјааБмеЯгыбВЯпГЬађЕФБраДЁЃдкБОЩшМЦжаЃЌЯЕЭГгВМўКЭШэМўЖМВЩгУСЫФЃПщЛЏНсЙЙЃЌећИіЯЕЭГЕФЕчТЗНсЙЙМђЕЅЃЌПЩППадИпЃЌдкЛњаЕНсЙЙЩшМЦЩЯВЩгУsolidworkШэМўНјааШ§ЮЌНЈФЃВЂЩњГЩМгЙЄЭМжНЁЃ
зюжеЃЌБОПЮЬтздааЩшМЦжЦдьЕФТжЪНжЧФмвЦЖЏЛњЦїШЫПЩЗжБ№ЪЕЯжзджїЖуБмеЯАЮяЙІФмКЭбАзЯпаазпЙІФмЁЃ
ЙиМќДЪЃКТжЪНвЦЖЏЛњЦїШЫЃЛбВЯпЃЛБмеЯЃЛ51ЯЕСаЕЅЦЌЛњ
The Development and Structure Design of Intelligent Wheeled Mobile Robot
Abstract
Self-tracing and obstacle avoidance electric vehicle is a kind of mobile robot, which is able to adapt various environments, humidity, magnetic radiation and gravity. Consequently the vehicle take the place of human to implement many tasks in the environment where human cannot set foot, which is applicable in many fields in the national defence and civilian.
This subject requires the self-designed wheeled intelligent mobile robot to achieve the function of autonomous obstacle avoidance, ranging and line inspection. The main task is to design and implement the vehicle based on 89C52RC single chip microcomputer, including hardware and software. The hardware circuit includes controller, tracking circuit, obstacle avoidance circuit and motor drive circuit. In terms of road information collection of wheeled intelligent mobile robot, this paper adopts SRF04 ultrasonic ranging sensor and TCRT5000 infrared sensor provided by robot laboratory as obstacle avoidance sensor and line patrol sensor. The wheeled intelligent mobile robot designed and manufactured by ourselves in this topic can realize the function of avoiding obstacles and walking along the white line independently.
Keywords: Wheeled mobile robot; Obstacle avoidance; single chip microcomputer
ФП ТМ
еЊЁЁвЊ i
Abstract ii
1. в§бд 1
1.1. ПЮЬтбаОПЕФБГОА 1
1.2. ПЮЬтбаОПЕФФПЕФгывтвх 1
1.3. ТжЪНжЧФмвЦЖЏЛњЦїШЫЗЂеЙИХПігыЯжзД 2
1.4. ЩшМЦгыПЊЗЂЕФжївЊФкШн 4
2. ЯрЙиММЪѕ 7
2.1. ЕЅЦЌЛњММЪѕ 7
2.2. жЧФмЕчЖЏаЁГЕММЪѕ 7
2.3. КьЭтДЋИаММЪѕ 8
2.4. ГЌЩљВЈММЪѕ 9
3. ЯЕЭГЗНАИЕФЗжЮібЁдё 11
3.1. жїПиЯЕЭГбЁгУ 12
3.2. ЕчЛњФЃПщЕФбЁгУ 13
3.2.1. ЕчЖЏЛњЕФбЁдё 13
3.2.2. Ч§ЖЏЦїбЁдё 15
3.3. ЙЉЕчЕчдДФЃПщбЁгУ 16
3.4. зджїбМЃКЭБмеЯЗНАИЕФбЁгУ 17
3.4.1. зджїбМЃЗНАИ 18
3.4.2. бМЃЗНАИгыДЋИаЦї 18
3.4.3. зджїБмеЯЗНАИ 20
3.4.4. БмеЯЗНАИгыДЋИаЦї 20
3.5. ДЋИаЦїЕФбЁгУ 22
3.5.1. ГЌЩљВЈДЋИаЦї 22
3.5.2. КьЭтЯпДЋИаЦї 22
3.5.3. SRF04ГЌЩљВЈВтОрФЃПщ 23
3.5.4. ЮхТЗбВЯпДЋИаЦїФЃПщ 24
4. ЛњаЕНсЙЙЕФЩшМЦгыжЦзї 27
4.1. ЛњаЕЩшМЦЕФЛљБОвЊЧѓ 27
4.1.1. ЖдЛњЦїећЛњЩшМЦЕФЛљБОвЊЧѓ 27
4.1.2. ЖдСуМўЩшМЦЕФЛљБОвЊЧѓ 27
4.2. вЦЖЏЛњЦїШЫГЕЬхНсЙЙЩшМЦддђ 28
4.3. ЛњаЕНсЙЙзмЬхЩшМЦЗНАИ 29
4.3.1. ЕзХЬНсЙЙЩшМЦ 30
4.3.2. ДЋИаЦїжЇМмЩшМЦ 31
4.3.3. ЕчЛњжЇМмЩшМЦ 32
4.3.4. ЕчЛњЕФбЁаЭгыМЦЫу 33
4.4. ЛњаЕВФСЯбЁдё 33
4.4.1. ЛњаЕВФСЯбЁгУддђ 33
5. гВМўЕчТЗЩшМЦ 37
5.1. ЮЂПижЦЦїФЃПщ 37
5.2. ЕчдДФЃПщ 38
5.3. зджїБмеЯФЃПщ 39
5.4. бВЯпМьВтФЃПщ 39
5.5. ЕчЛњЧ§ЖЏФЃПщ 40
6. ШэМўГЬађЕФЩшМЦ 41
6.1. ШэМўПЊЗЂЦНЬЈЕФбЁдё 41
6.2. ПижЦШэМўЕФЩшМЦгыЪЕЯж 42
6.2.1. ИХЪі 42
6.2.2. ШэМўЕФНсЙЙЩшМЦ 43
6.3. бМЃФЃЪНГЬађСїГЬЭМ 44
6.4. БмеЯФЃЪНГЬађСїГЬЭМ 44
7. ТжЪНжЧФмвЦЖЏЛњЦїШЫЙІФмВтЪдМАаЇЙћ 47
7.1. зджїБмеЯЙІФмЕФВтЪдМАаЇЙћ 47
7.2. зджїбВЯпЙІФмЕФВтЪдМАаЇЙћ 48
НсЪјгя 49
ВЮПМЮФЯз 51
ИНТМ 53
Лљгк89C52RCЕЅЦЌЛњГЬађCДњТы 53
ЭтЮФзЪСЯ 63
жаЮФвыЮФ 71
жТ аЛ 75
|
