ВЁШЫаазпИЈжњЛњЙЙ(ЯТжЋаазпПЕИДЛњЦїШЫ)ЕФЩшМЦ(PROEШ§ЮЌЭМ)
РДдДЃКwenku7.com зЪСЯБрКХЃКWK717826 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK717826
вдЯТЪЧзЪСЯНщЩм,ШчашвЊЭъећЕФЧыГфжЕЯТдиЁЃ
1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
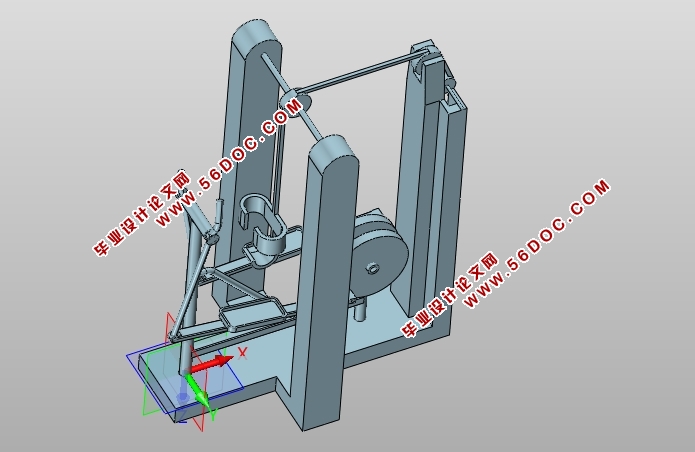
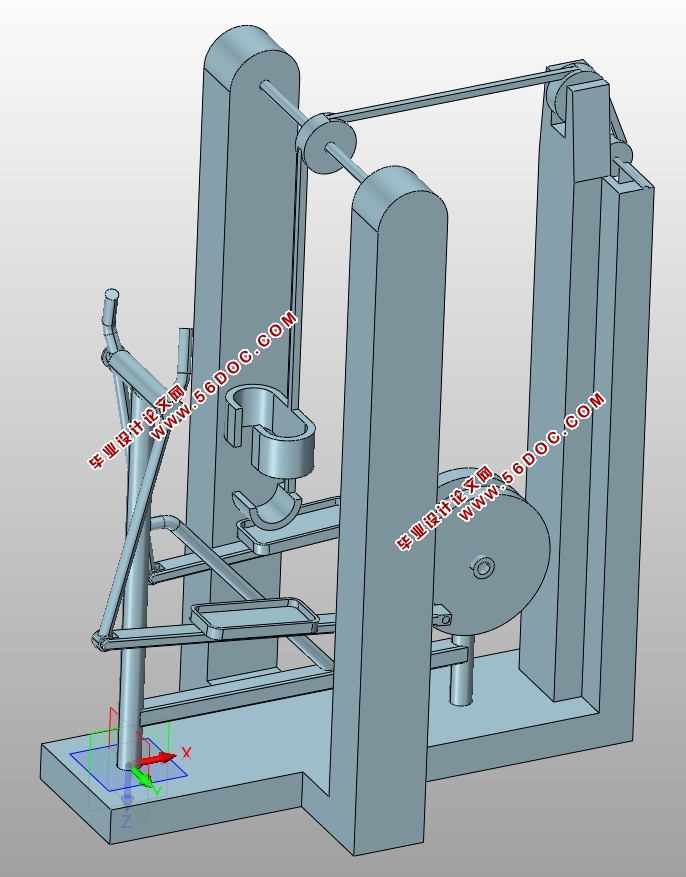
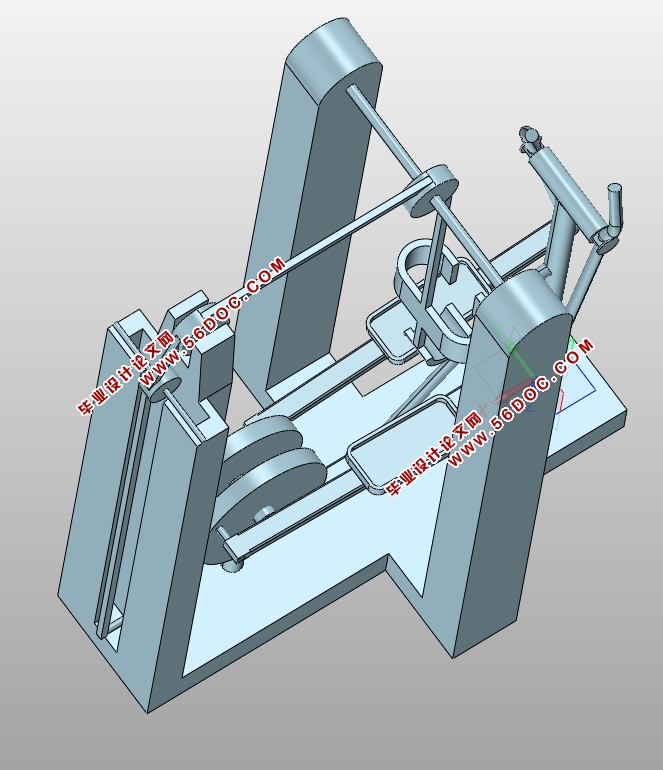
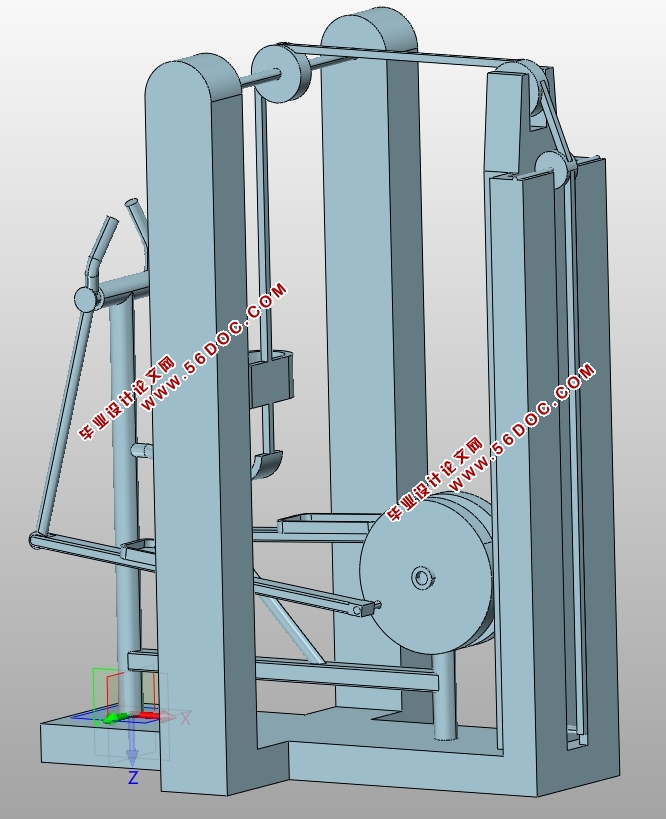
ВЁШЫаазпИЈжњЛњЙЙ(ЯТжЋаазпПЕИДЛњЦїШЫ)ЕФЩшМЦ(PROEШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ15000зж,PROEШ§ЮЌЭМ)
еЊвЊ
ПЕИДЛњЦїШЫММЪѕдђЪЧНќФъРДбИЫйЗЂеЙЕФвЛУХаТаЫЛњЦїШЫММЪѕЃЌЪЧЛњЦїШЫММЪѕдквНбЇСьгђЕФаТгІгУЃЛФПЧАПЕИДЛњЦїШЫвбГЩЮЊЙњМЪЩчЛсбаОПЕФШШЕужЎвЛЁЃБОПЮЬтжївЊбаОПЕФжаЗчВЁШЫаазпИЈжњЛњЙЙЁЃ
ЫцзХЩчЛсЕФЗЂеЙКЭПЦММЕФНјВНЃЌЮДРДЕФЩшМЦЪЧЛљгкбаОПКЭвдШ§ЮЌдьаЭЮЊЛљДЁЕФЩшМЦЁЃдквдКѓЕФЩшМЦжаЛсИќМгЖрЕФМгШыШЫЛњЙЄГЬбЇЕФФкШнЃЌЖјШЫЛњЙЄГЬбЇЕФбаОПвВГЪЯжГіСЫКмЖреИаТЕФУцУВЃЌЦфЖЈвхЕФЗЖЮЇвВдкВЛЖЯЭиеЙЁЃБОДЮЩшМЦЪЧЭЈЙ§ШЫЛњЙЄГЬбЇгыЪЕМЪЯрНсКЯЃЌвдPro/EЮЊЛљДЁЃЌНсКЯШЫЬхГпДчРДЩшМЦдЫЖЏЦїВФЭждВЛњЕФЁЃЦфжаДѓСПЕФдЫгУЕНPro/EММЪѕРДЩшМЦЃЌвдЪЕЯжЭждВЛњЕФШ§ЮЌдьаЭЁЃЭждВЛњЕФЩшМЦЪЕЯжСЫдкаЁЗЖЮЇФкДяЕНПЦбЇЖЭСЖЩэЬхЕФФПЕФЃЌЦфВйзїМђЕЅУїСЫЃЌдывєаЁЃЌЮоЮлШОЃЌЪЙгУАВШЋПЩППЁЃ
ЙиМќДЪЃКжаЗч аазпИЈжњЛњЙЙ ПЕИД
ABSTRACT
The rehabilitation robot technology is a new robot technology developed rapidly recently, which is a new application in medical fields of robot technology. Currently the research on rehabilitation robot has been one of the focuses in the International Society. The rehabilitation robot technology is a synthesis of many subjects, which covers mechanics, electronics, control and rehabilitative medicine and so on; it has been a typical representation of the mechatronics research. The main research of this paper is based on the attitude control gait rehabilitation training system design.
In this paper, lower extremity rehabilitation and development of robot applications at home and abroad, lower extremity exoskeleton training robot's overall program design, structural design, design and overall control; gait training on the robot for three-dimensional modeling, and important parts to check. The robot gait training has a total of five degrees of freedom, each of which a mechanical leg joints have two (2 DOF) to imitate human knee, hip and a weight relief for weight relief system (including a degree of freedom). The system can be used for brain injury, stroke, and to help patients better rehabilitation training, and meets the needs of different groups of people.
Key wordsЃКrehabilitation training robot lower extremity exoskeletons
ФПТМ
еЊвЊ I
ABSTRACT II
ЕквЛеТ аїТл 1
1.1ЯТжЋаазпИЈжњЛњЙЙбаОПБГОА 1
1.2 жаЗчВЁШЫаазпИЈжњЛњЙЙбаОПФПЕФКЭвтвх 1
1.3 ВЁШЫаазпИЈжњЛњЙЙбаОПИХПі 2
1.3.1 ЙњЭтбаОПЗЂеЙИХПі 2
1.3.2 ЙњФкбаОПЗЂеЙИХПі 6
1.4ДцдкЮЪЬт 9
1.5ТлЮФбЁЬтвтвхМАбаОПФкШн 9
ЕкЖўеТ ШЫЬхЯТжЋдЫЖЏЗжЮі 11
2.1ШЫЬхЯТжЋНтЦЪзїгУ 11
2.2ЯТжЋжївЊЙиНкЬиеї 12
2.3 ВНЬЌЗжЮі 14
ЕкШ§еТ ЭждВЛњЩшМЦ 15
3.1 ЛљгкЛњаЕЩшМЦдРэжсЕФЩшМЦЃЈАќРЈЬзЭВЕФЩшМЦЃЌжсГаЕФбЁдёЃЉ 15
3.1.1 жсЂёЕФНсЙЙЩшМЦ 15
3.1.2 жсЂђЕФНсЙЙЩшМЦ 16
3.1.3 жсЂѓЕФНсЙЙЩшМЦ 18
3.2 ТнФИЕФбЁдёМАЦфжївЊГпДч 19
3.3 ЭждВЛњЕФШЫЛњЙЄГЬЩшМЦ 19
3.3.1 ЭждВЛњЕФМђНщМАЦфЩшМЦвЊЧѓ 19
3.3.2 ШЫЬхГпДчЕФбЁдё 20
3.3.3 ЬЄАхМфОрКЭЬЄАхДѓаЁЕФШЗЖЈ 22
3.3.4 ЭтЙлМАЩЋВЪЩшМЦ 22
ЕкЫФеТ ШЫЬхИКжизАжУ 24
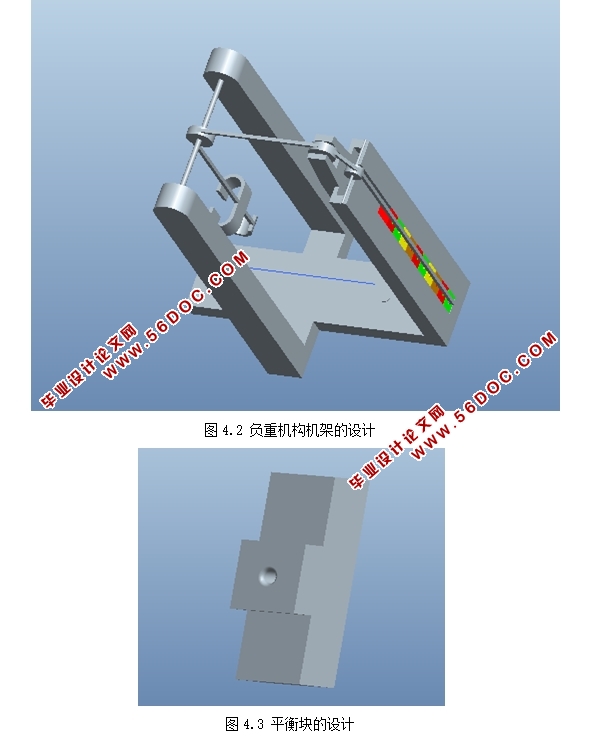
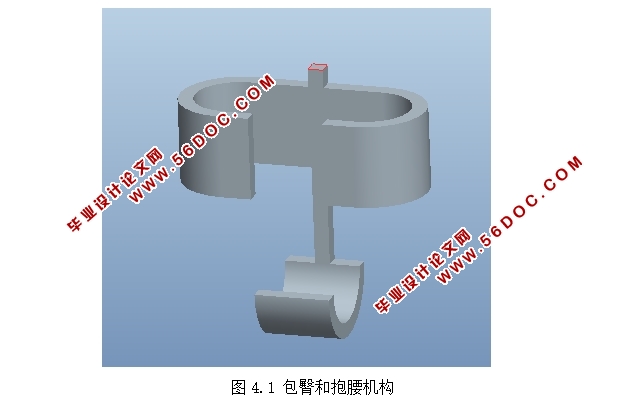
4.1АќЭЮКЭБЇбќЕФЩшМЦ 24
4.2ИКжиЛњЙЙЛњМмЩшМЦ 24
4.3ИКжиЛњЙЙЕФЦНКтПщЕФЩшМЦ 25
ЕкЮхеТ Pro/EНЈФЃ 26
5.1 жсЕФШ§ЮЌФЃаЭаЮГЩ 26
5.2 жсГаЕФШ§ЮЌФЃаЭаЮГЩ 27
5.3 ЕцШІЕФШ§ЮЌФЃаЭаЮГЩ 28
5.4 ТнФИЕФШ§ЮЌФЃаЭаЮГЩ 29
5.5 ЬЄАхЕФШ§ЮЌФЃаЭаЮГЩ 30
5.6 ЕззљМАЦфСЌНгВПЗжШ§ЮЌФЃаЭЕФаЮГЩ 30
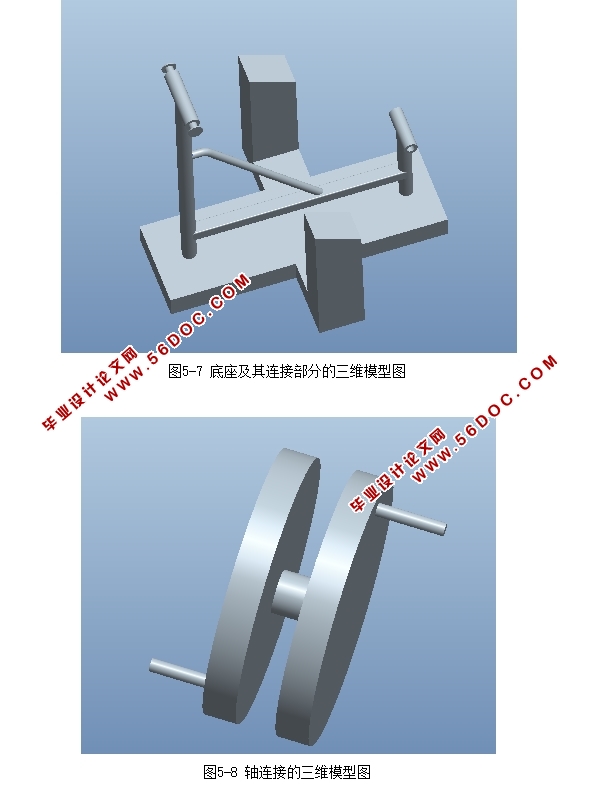
5.7 жсСЌНгШ§ЮЌФЃаЭаЮГЩ 31
5.8 ИЫСЌНгВПЗжШ§ЮЌФЃаЭЕФаЮГЩ 32
5.9 жсШ§ЮЌФЃаЭЕФаЮГЩ 33
5.10 ИЫСЌНгШ§ЮЌФЃаЭЕФаЮГЩ 33
5.11 ИКжиЛњЙЙШ§ЮЌФЃаЭ 34
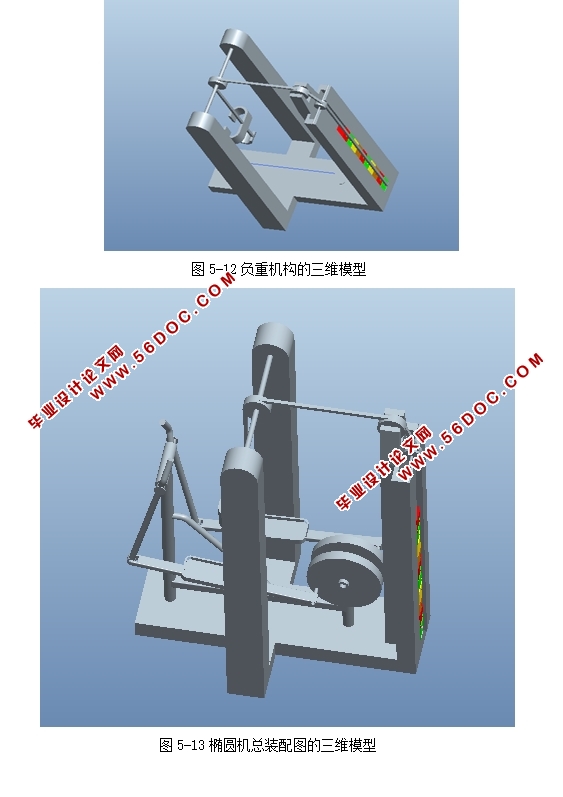
5.12 ЭждВЛњзмзАХфЭМЕФШ§ЮЌФЃаЭ 35
ЕкСљеТ НсТл 36
ВЮПМЮФЯз 37
|
