平面关节型机械手设计(含CAD零件图装配图)
来源:wenku7.com 资料编号:WK717797 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK717797
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
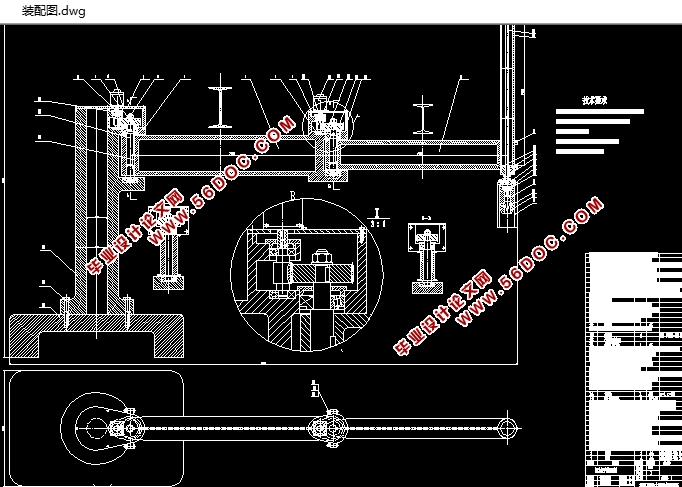
平面关节型机械手设计(含CAD零件图装配图)(论文说明书7000字,CAD图纸7张)
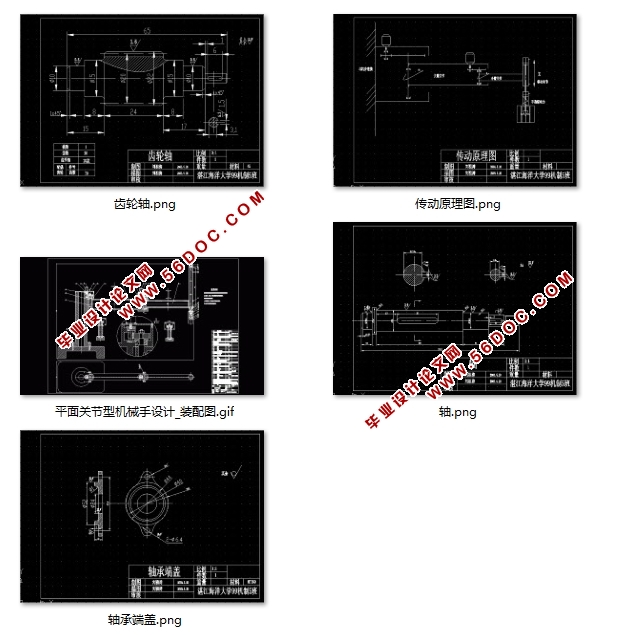
[摘要] 平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
关键词: 机械手 轴承 汽缸
[Abstract] Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down . the work room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’ journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section .
Key words: manipulator axletree cylinder
工业机械手是一种模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取、搬运工件或操作工具的自动化装置。它在二十世纪五十年代就已用于生产,是在自动上下料机构的基础上发展起来的一种机械装置,开始主要用来实现自动上下料和搬运工件,完成单机自动化和生产线自动化,随着应用范围的不段扩大,现在用来夹持工具和完成一定的作业。实践证明它可以代替人手的繁重劳动,减轻工人的劳动强度,改善劳动条件,提高劳动生产率。
平面关节型机器人又称SCARA型装配机器人,是Selective Compliance Assembly Robot Arm的缩写,意思是具有选择柔顺性的装配机器人手臂。在水平方向有柔顺性,在垂直方向有较大的刚性。它结构简单,动作灵活,多用于装配作业中,特别适合小规格零件的插接装配,如在电子工业零件的插接、装配中应用广泛。
总体设计的任务:包括进行机械手的运动设计,确定主要工作参数,选择驱动系统和电控系统,整体结构设计,最后绘出方案草图。
1.1 主要技术参数
主要技术参数见表1-1
表1-1
机械手类型 平面关节型
抓取重量 2.2Kg
自由度 3个(2个回转1个移动)
大臂 长700mm,回转运动,回转角240,步进电机驱动 单片机控制
小臂 长600mm,回转运动,回转角240,步进电机驱动 单片机控制
移动关节 气缸驱动 行程开关控制
手指 气缸驱动 行程开关控制
该方案是平面关节型机械手设计,平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
工业机械手的手部是用来抓持工件或工具的部件。手部抓持工件的迅速、准确和牢靠程度都将直接影响到工业机械手的工作性能,它是工业机械手的关键部件之一,设计时要注意的问题:
(1) 手指应有足够的夹紧力,为使手指牢靠的夹紧工件,除考虑夹持工件的重力外,还应考虑工件在传送过程中的动载荷。
(2) 手指应有一定的开闭范围。其大小不仅与工件的尺寸有关,而且应注意手部接近工件的运动路线及其方位的影响。
(3) 应能保证工件在手指内准确定位。
(4) 结构尽量紧凑重量轻,以利于腕部和臂部的结构设计。
(5) 根据应用条件考虑通用性。
臂部是机械手的主要执行部件,其作用是支撑手部和腕部,主要用来改变工件的位置。手部在空间的活动范围主要取决于臂部的运动形式,设计时注意的问题:
(1) 刚度要好,要合理选择臂部的截面形状和轮廓尺寸,空心杆比实心杆刚度大的多,常用钢管做臂部和导向杆,用工字钢和槽钢左支撑板,以保证有足够的刚度。
(2) 偏重力矩要小,偏重力矩时指臂部的总重量对其支撑或回转轴所产生的力矩。
(3) 重量要轻,惯量要小,为了减轻运动时的冲击,除采取缓冲外,力求结构紧凑,重量轻,以减少惯性力。
(4) 导向性要好。
目录 2
设计要求 3
第1章 机械手总体设计 4
1.1 主要技术参数 4
1.2 结构特点 4
第2章 手指设计 6
2.1 设计时要注意的问题 6
2.2 零件的计算 6
第3章 移动关节的设计计算 9
3.1驱动方式的比较 9
3.2汽缸的设计 9
第4章 小臂的设计 12
4.1 设计时注意的问题 12
4.2 小臂结构的设计 12
4.3 轴的设计计算 13
4.4 轴承的选择 13
4.5 轴承摩擦力矩的计算 14
4.6 驱动选择 15
第5章 大臂的设计计算 17
5.1 结构的设计 17
5.2 轴的设计计算 17
5.3 轴承的选择 18
5.4 轴承摩擦力矩的计算 19
5.5 伺服系统的选择 20
第6章 机身的设计 21
6.1 设计时注意的问题 21
6.2 设计方案确定 21
翻译 22
鸣谢 27
参考文献 28
|
