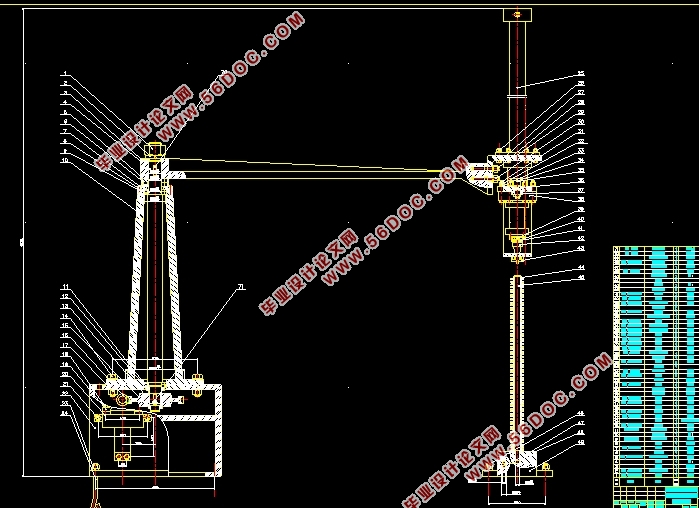
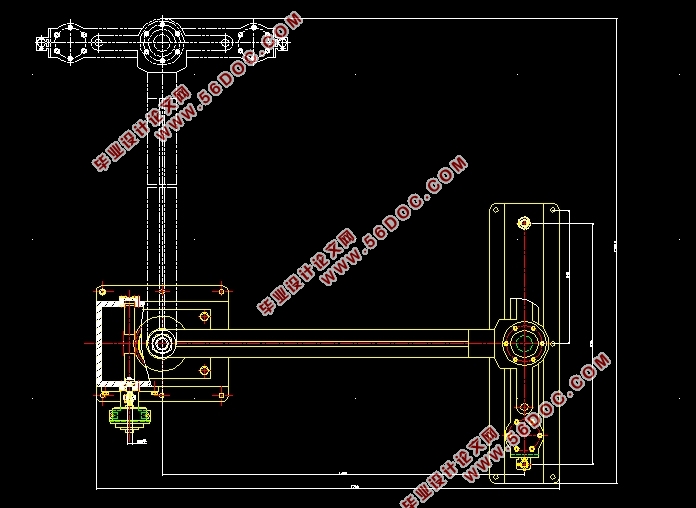
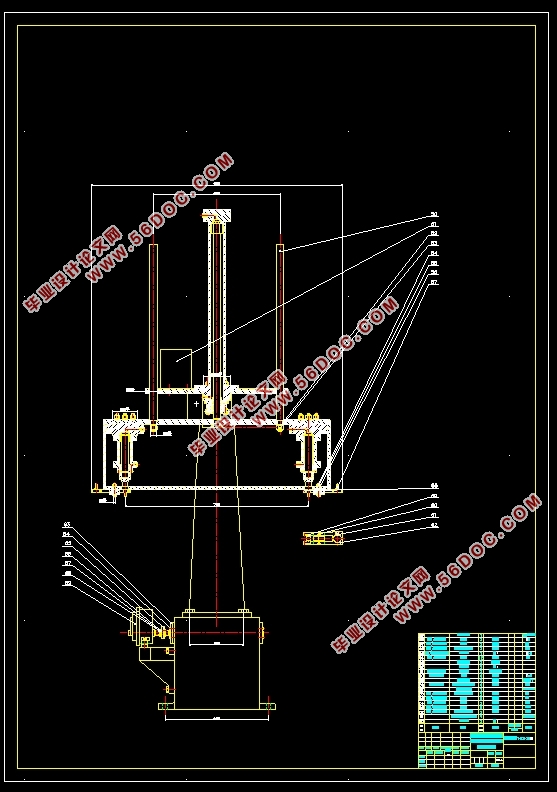
坐标机器人式减震器盖装配线自动给料机设计(含CAD图) 来源:wenku7.com 资料编号:WK717770 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK717770 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 坐标机器人式减震器盖装配线自动给料机设计(含CAD图)(开题报告,设计说明书12000字,CAD图纸3张) 摘要 机器人自问世以来到现在,经过了40多年的发展,已被广泛应用于各个工业领域,已成为工业现代化的重要标志。但是,目前工厂实际应用的工业机器人大部分都以”示教-再现”的工作方式运行。由于这种工作方式是开环工作方式,缺乏对外部变化信息的了解,譬如作业对象发生了偏移或者变形导致位置发生变化,或者其再现轨迹上有障碍物出现时,工业机器人就不能根据这些变化实时地调整其运动呢轨迹,缺乏灵活性和适应性,因此我们引进计算机视觉系统,在原有的Motoman UP6工业机器人系统以及相关的软件组成。通过这套计算机视觉系统,获取操作对象和周围环境的图像信息并进行分析处理,实现对图像中特征点的三维空间定位,然后由计算机利用机器人远程控制软件Motocom32对工业机器人进行远程控制,实现机器人相关知识、工业机器人运动学的正逆解问题,并综合运用机器人运动学理论,利用Motocom32软件与机器人在控制柜通讯,通过对机器人程序文件的上传、分析、规划重组和下载等处理,实现了对运动中工业机器人轨迹的实时规划。然后详细地介绍了整个工业机器人视觉系统的软硬件组成以及摄像机的定标问题。在总结传统定标方法的基础上,结合本系统实际情况,提出简单、快速的摄像机内外参数的定标与修正方法。该方法在摄像机模型中全面考虑了镜头的非线型畸变和系统误差,在直接线性标定法中引入了处理镜头非线性畸变和系统误差的因子,通过简单的迭代求解实现了对摄像机的快速定标。随后论述了现有成熟的图像处理算法,在此基础上,设计了一组使用的图像处理方法,包括图像预处理,图像分科和边缘检测,图像特征提取以及图像特征量的计算,有效地求出了图像特征量信息。所采用的立体成像方式、三维重建方法和模型,以及立体视觉中的图像匹配的问题,根据前面求解出的图像特征量信息,对从不同视点的获取的幅图像序列进行匹配,并利用三维重组技术,结合摄像机定标的内外参数所确定的空间点与其在图像平面上投影点的投影关系,求解出空间点的三维坐标信息。利用这些三维信息,由计算机产生相应的机器人运动控制命令,通过Motocom32软件对机器人进行远程控制,实现机器人对这些空间点的自动定位和跟踪。 关键词 计算机视觉系统 机器人运动学 参数定标和修正 立体成像 2.1 任务 [1] 装配线节拍 90s [2] 同时上料数 2 [3] 两件固定间距 900mm [4]上料正确率 100% 3 方案的确定 3.1 总体方案的确定 方案1:采用机械手式机器人,两个手臂分别进行对单一工件的抓取和放置,对于一个机械手:大臂带动小臂和执行部分旋转,小臂以大臂端部为中心旋转,实现XY平面内的自由移动,在小臂的端部安装实现机械手上下移动的大液压缸,在机械手部分安装可以驱动其动作的小液压缸,两个旋转动作由伺服电机驱动,液压回路保证机械手的稳定而准确的位置,在大液压缸处安装位移传感器,在机械手靠近工件的端部安装接近传感器,确保机械手与工件和工作台的准确位置关系。 方案2:总体采用圆柱坐标式机器人,立柱带动横臂和整个执行机构旋转,执行机构中大液压缸实现包括两个小液压缸的执行部分的竖直方向的移动,并由位移传感器准确定位,两个小液压缸驱动两机械手实现对工件的夹持和放松,在机械手的端部安装接近传感器,以确定三液压缸正确的定位。立轴旋转由伺服电机驱动,以确保精确的角度控制,三液压缸在液压回路的驱动下能实现精确而稳定的位置控制。 由于第二种方案比第一种方案少一个自由度的控制,并且结构相对简单,设计制造相对容易,故选用第二种方案。 目录 1. 引言.....................................................1 1.1 机器人产生的背景........................................1 1.2 发展机器人的理由........................................1 1.3 机器人的特点............................................1 1.4 机器人的产生发展过程....................................2 1.5 我过机器人发展的基本概况................................3 1.6 机器人的应用............................................3 1.7 工业机器人的未来发展....................................6 2. 设计任务书...............................................7 2.1 任务....................................................7 2.2 工作内容................................................7 2.3 进度计划................................................7 3. 方案的确定...............................................8 3.1 总体方案的确定..........................................8 3.2 局部方案的确定..........................................8 3.2.1 立轴旋转驱动的确定....................................8 3.2.2 涡轮蜗杆减速装置的确定................................9 3.2.3 立轴及相关零件尺寸和结构的确定........................9 3.2.4 横臂及其相关零件结构的确定............................9 3.2.5 大液压缸的选择和安装的确定............................9 3.2.6 执行机构及其相关零件结构的确定........................10 3.2.7 所需传感器的确定......................................10 4. 设计计算.................................................12 4.1 电机功率和转矩的校核....................................12 4.2 涡轮蜗杆的设计校核......................................12 4.2.1 选择蜗杆、涡轮材料,确定许用应力......................12 4.2.2 选择z1、z2............................................13 4.2.3 按齿面接触疲劳强度设计................................13 4.2.4 检验假设参数..........................................14 4.2.5 验算齿根弯曲疲劳强度..................................14 4.2.6 热平衡计算............................................14 4.3 键的校核................................................15 4.3.1 立轴上端键的校核......................................15 4.3.2 立轴下端键的校核......................................16 5. 液压回路设计.............................................17 6. 控制系统设计.............................................19 7. 程序语句.................................................21 8. 总结.....................................................23 8. 致谢.....................................................24 9. 参考文献.................................................25