ХРБкЧхЯДЛњЦїШЫЕФЩшМЦ(КЌCADСуМўзАХфЭМ,PROEШ§ЮЌЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,жаЦкМьВщБэ,ЭтЮФЗвы,ТлЮФЫЕУїЪщ12000зж,CADЭМ4еХ,PROEШ§ЮЌЭМ)
еЊвЊ
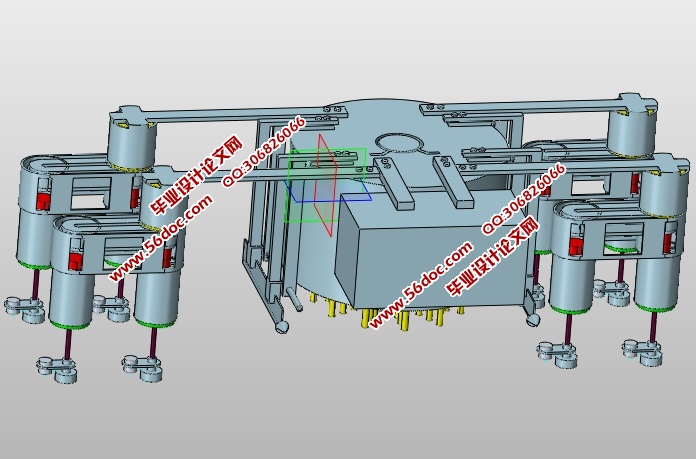
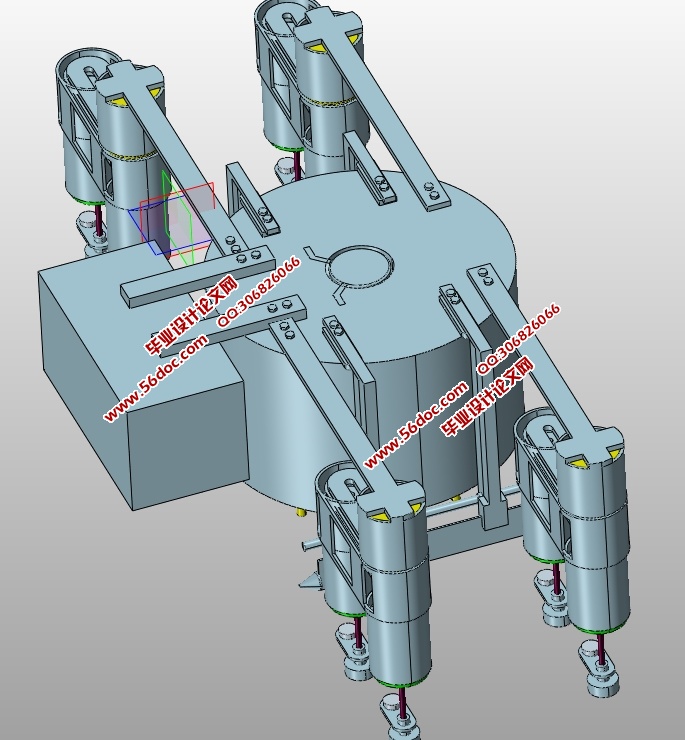
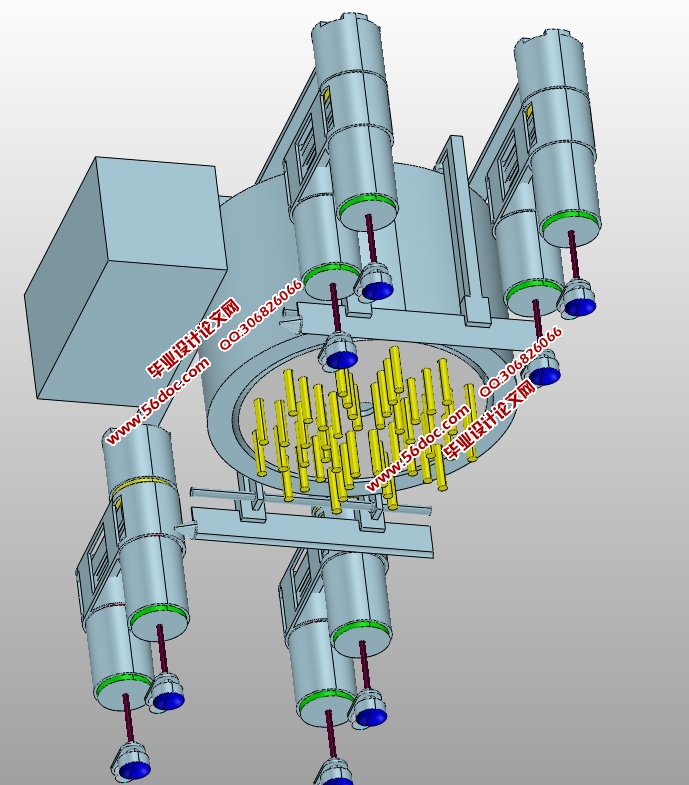
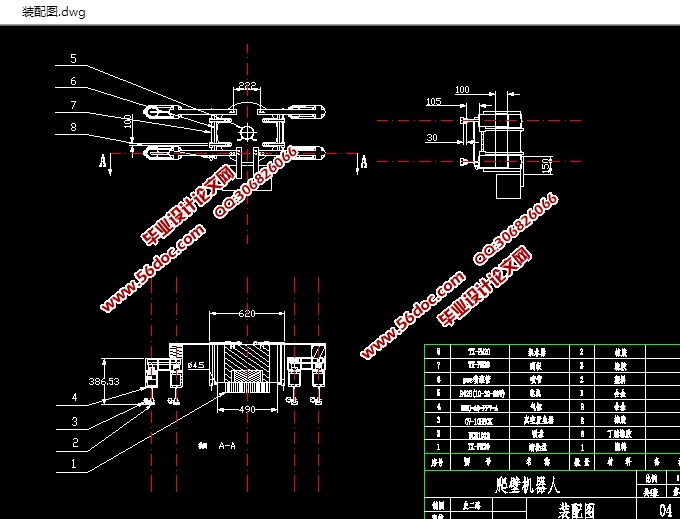
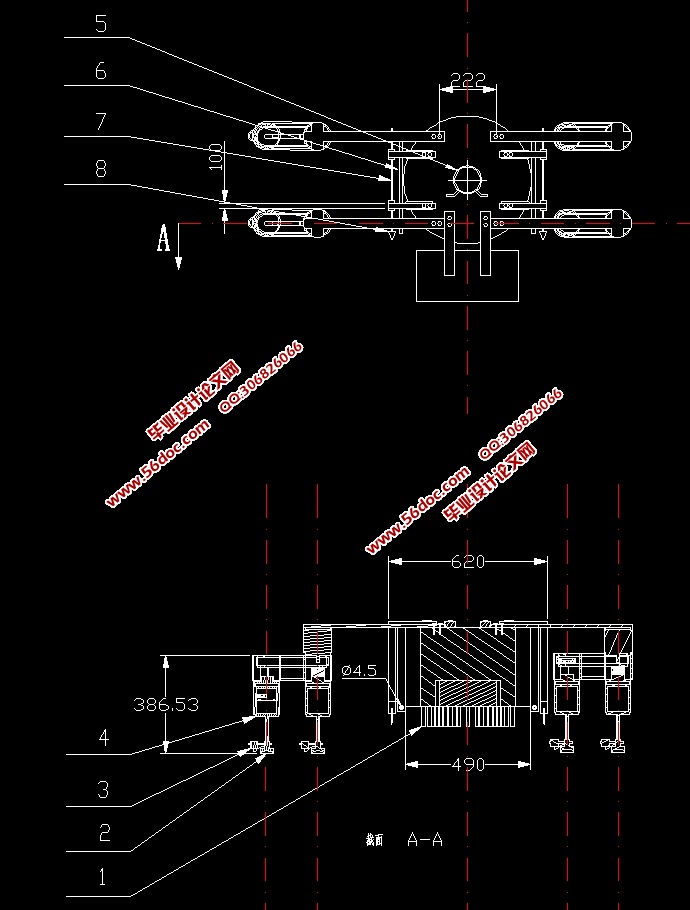
ЫцзХОМУЕФВЛЖЯЗЂеЙКЭНЈжўаавЕЕФаЫЦ№ЃЌФІЬьДѓТЅШчгъКѓДКЫёАугПЯжГіРДЁЃЪРНчЩЯзюИпЕФДѓТЅЪЧЕЯАнЕФЙўРћЗЈЫўЃЌИп828УзЃЌТЅВуЙВга162ВуЃЌВЃСЇФЛЧНУцЛ§ДяЕН14.2ЭђЦНЗНУзЁЃжаЙњаоНЈЕФзюИпДѓТЅЮЊЩЯКЃжааФДѓЯУЃЌзмИпЖШЮЊ632УзЃЌВЃСЇФЛЧНДя14ЭђЦНЗНУзЁЃетаЉНЈжўЖМЪЧПЦММЕФНсОЇЃЌвВЪЧУПвЛИіГЧЪаЕФЕиБъадНЈжўЁЃЕЋЪЧВЃСЇФЛЧНдкИјШЫУЧУРЙлЯэЪмЕФЭЌЪБЃЌвВЛсДјРДвЛаЉЧхНрЩЯЕФЮЪЬтЁЃетаЉИпТЅЭтЧНЕФЧхЯДЙЄзїЪЧгЩШЫЙЄЭъГЩЃЌШЫЙЄЧхЯДКФЗбЪБМфГЄЃЌКФзЪОоДѓвВЗЧГЃШнвзГіЪТЙЪЃЌЮЃЯеадКмИпЁЃЕБЛњЦїШЫММЪѕдНРДдНГЩЪьЃЌИпВуНЈжўДѓЖрВЩгУВЃСЇзіФЛЧНЪБЃЌЛњЦїШЫДњЬцШЫЙЄНјааЧхЯДзївЕвбГЩЮЊгІгУЧїЪЦЁЃвђДЫЃЌХРБкЧхЯДЛњЦїШЫОпгаЙуРЋЕФгІгУЧАОАКЭСМКУЕФЩчЛсаЇвцЁЃ
БОТлЮФдкЛњЦїШЫБОЬхЩЯАВзАЧхЯДзАжУЃЌРћгУЮќХЬРДЮќИНЧНУцЁЃЧ§ЖЏЗНЪНВЩгУЦјИзРДЪЕЯжЮќХЬЕФЬЇЦ№КЭТфЯТЃЌЭЈЙ§СНИіПЩвдЯрЖдзЊЖЏЕФЮќХЬЪЕЯжвЦЖЏаазпЃЌЪЙВЃСЇФЛЧНЕФЧхЯДЙ§ГЬЪЕЯжздЖЏЛЏЁЃБОЮФВЩгУProeРДЭъГЩЛњЦїШЫЕФШ§ЮЌЭМЛцжЦВЂНјааНсЙЙжїЬхВЮЪ§ЩшМЦЁЃзюКѓЃЌЭЈЙ§PLCНјааХРБкЧхЯДЛњЦїШЫПижЦВПЗжЕФЩшМЦЁЃ
ЙиМќДЪЃКХРБкЧхЯДЛњЦїШЫЃЛProeЃЛPLC
Abstract
With the continuous development of the economy and the rise of the construction industry, skyscrapers have sprung up.The tallest building in the world is Burj Khalifa in Dubai. It is 828 meters high, with 162 floors and 142,000 square meters of glass curtain walls. The tallest building built in China is the Shanghai Center Tower, with a total height of 632 meters and a glass curtain wall of 140,000 square meters. These buildings are the crystallization of science and technology and are landmarks for every city. However, the glass curtain wall will bring about some clean problems while people enjoy it. The cleaning of these high-rise exterior walls is done manually. Manual cleaning takes a long time. It is very costly and accident-prone. The danger is high. When robot technology becomes more and more mature, and high-rise buildings mostly use glass as the curtain wall, robots have become an application trend instead of manual cleaning. Therefore, wall-climbing robots have broad application prospects and good social benefits.
In this paper, a cleaning device is installed on the robot body, and a sucker is used to adsorb the wall surface. The driving method adopts a cylinder to realize the lifting and falling of the sucker, and the movable walking is achieved through two suckers that can relatively rotate, so that the cleaning process of the glass curtain wall is automated. This paper uses Proe to complete the three-dimensional drawing of the robot and design the main parameters of the structure. Finally, the design of the control part of the wall-climbing robot is performed through the PLC.
Keywords: Wall climbing cleaning robotЃЛProeЃЛ PLC
1.4.1ХРБкЧхЯДЛњЦїШЫЕФХРБкЯЕЭГЕФЩшМЦ
ХРБкЛњЦїШЫИљОнХРБкЗНЪНПЩЗжЮЊЮќХЬЮќИНХРБкЛњЦїШЫЁЂДХЮќИНХРБкЛњЦїШЫЁЂЗЩЯшЪНХРБкЛњЦїШЫЁЂЩўзгЧЃв§ЪНХРБкЛњЦїШЫЁЂеГзХМСЮќИНЪНХРБкЛњЦїШЫЁЃгЩгкФЛЧНЕФЖржжЖрбљЃЌОЭЛсГіЯжВЃСЇЧНУцИпЕЭВЛвЛЕФЧщПіЃЌЛсгавЛЕуЭЙЦ№ЕФДЩзЉЛђепЕВАхЃЌЫљвдЛњЦїШЫЕФХРБкЯЕЭГашвЊгавЛЖЈЕФдНеЯЙІФмЁЃЭЈЙ§ЖдЛњЦїШЫЮќХЬЮЛжУЕФЩшМЦЁЂжБОЖЕФМЦЫуЁЂЮќИНЗНЪНЩшМЦЁЂПчдНеЯАЮяИпЖШЩшМЦЕШЩшМЦГівЛжжМђЕЅЗНБуЕФХРБкЯЕЭГЁЃ
1.4.2ХРБкЧхЯДЛњЦїШЫЕФЧхЯДзївЕЯЕЭГЩшМЦ
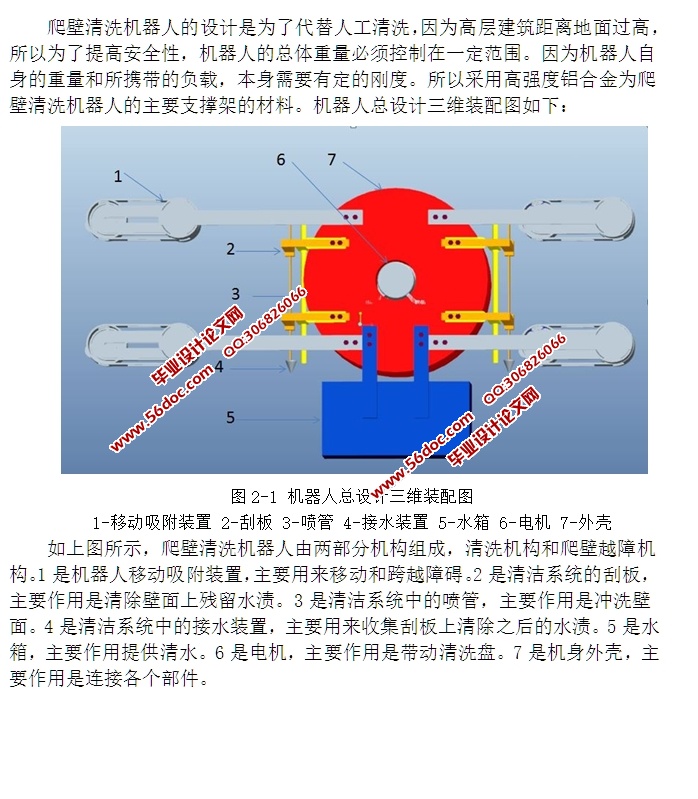
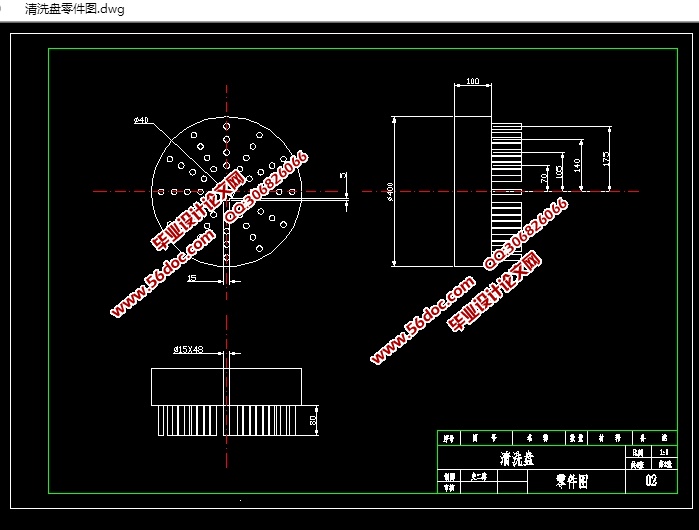
ХРБкЧхЯДЛњЦїШЫЧхЯДзївЕЯЕЭГжагаХчЮэГхЯДЁЂЧхЯДХЬЫЂЯДЁЂЙЮАхЙЮЯДЁЂЫЎбЛЗЛиЪеЕШЩшМЦЃЌХчЮэзАжУМШПЩвдГхЫЂБкУцЃЌЧхЯДХЬПЩвдДѓУцЛ§ЧхЯДЃЌЙЮАхЖдЫЎЛиЪеРћгУЃЌетЬзЧхЯДЯЕЭГФмгааЇЕФЧхЯДФЛЧНБкУцЃЌВЂЧвМгДѓЧхЯДаЇТЪЁЃ
1.4.3ХРБкЧхЯДЛњЦїШЫЕФПижЦЯЕЭГЩшМЦ
БОДЮЩшМЦВЩгУЕФЪЧPLCРДНјааХРБкЧхЯДЛњЦїШЫЕФПижЦЃЌвђЮЊPLCЕФВйзїМђЕЅЃЌБугкПижЦЃЌPLCашвЊЖдИУПюЛњЦїШЫНјааЮќХЬЭбРыЁЂЮќХЬЮќИНЁЂЕчЛње§ДЋЁЂЕчЛњЗДзЊЁЂЧхЯДЫГађЕШПижЦЁЃ
ФПТМ
1 аїТл 1
1.1 бЁЬтБГОАМАвтвх 1
1.2ЙњФкЭтбаОПЯжзДгыЗЂеЙЧїЪЦ 1
1.2.1ЙњЭтбаОПЯжзДгыЗЂеЙЧїЪЦ 1
1.2.2ЙњФкбаОПЯжзДгыЗЂеЙЧїЪЦ 3
1.3ИпТЅЧхЯДХРБкЛњЦїШЫДцдкЕФЮЪЬт 3
1.4 баОПФкШн 4
1.4.1ХРБкЧхЯДЛњЦїШЫЕФХРБкЯЕЭГЕФЩшМЦ 4
1.4.2ХРБкЧхЯДЛњЦїШЫЕФЧхЯДзївЕЯЕЭГЩшМЦ 4
1.4.3ХРБкЧхЯДЛњЦїШЫЕФПижЦЯЕЭГЩшМЦ 4
1.5БОеТаЁНс 5
2 ХРБкЧхЯДЛњЦїШЫзмЬхЗНАИ 6
2.1 ЩшМЦзМдђгывЊЧѓ 6
2.2ХРБкЧхЯДЛњЦїШЫаазпдНеЯЛњЙЙЩшМЦ 6
2.3 ХРБкЧхЯДЛњЦїШЫЧхЯДзАжУЩшМЦ 7
2.4 БОеТаЁНс 8
3 ХРБкЧхЯДЛњЦїШЫЧхЯДЛњЙЙЕФЩшМЦ 9
3.1ЙіЫЂзАжУЕФЩшМЦ 9
3.2ЧхЯДвКЕФХчШїКЭбЛЗзАжУЩшМЦ 10
3.3ЫЎБУЕФбЁдё 12
3.4БОеТаЁНс 13
4 ХРБкЧхЯДЛњЦїШЫХРБкдНеЯЛњЙЙЕФЩшМЦ 14
4.1ХРБкЧхЯДЛњЦїШЫЧ§ЖЏЗНЪН 14
4.2ЮќИНзАжУЕФЩшМЦ 14
4.3ЛњЦїШЫПчдНеЯАКЭТЗОЖЙцЛЎ 16
4.4ЦјИздЫЖЏВПЗж 17
4.5БОеТаЁНс 18
5 ХРБкЧхЯДЛњЦїШЫПижЦВПЗжЩшМЦ 19
5.1 PLCЕФИХЪі 19
5.2 PLCЕФI/OПкЗжХф 19
5.3 PLCбЁаЭ 20
5.4 PLCЬнаЮЭМ 20
5.5БОеТаЁНс 21
ВЮПМЮФЯз 1
жТ аЛ 2
ИНТМA зАХфЭМКЭСуМўЭМ 3
ИНТМB ЭтЮФЗвы 7
|
