数控卧式镗铣床机械手运动机构设计(含CAD装配图,SolidWorks三维图)(论文说明书13400字,外文翻译,CAD图3张,SolidWorks三维图)
摘 要
数控卧式镗铣床是一种具有自动换刀装置和任意分度数控转台的点位-直线数字控制机床,工件在一次装夹后能自动完成几个侧面钻、铣、镋、铰、攻丝等多种工序的加工。数控卧式镋铣床的发展和应用,极大的减少了零件的加工辅助时间,很大程度上提高了生产效率,数控卧式机床的发展已经变成了当今广泛应用的一种更为新颖、更为先进的制造设备。
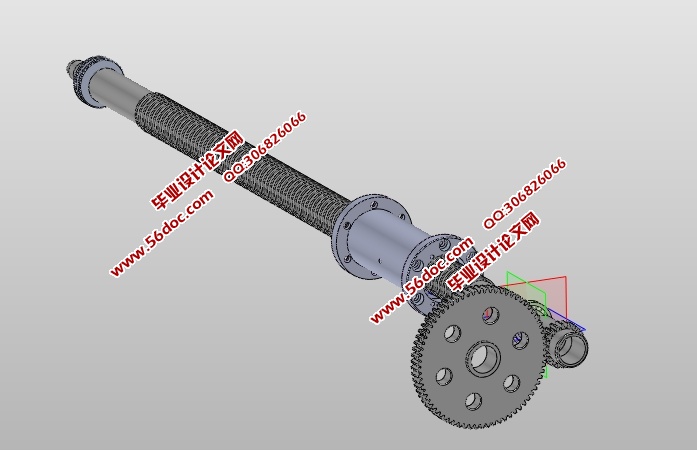
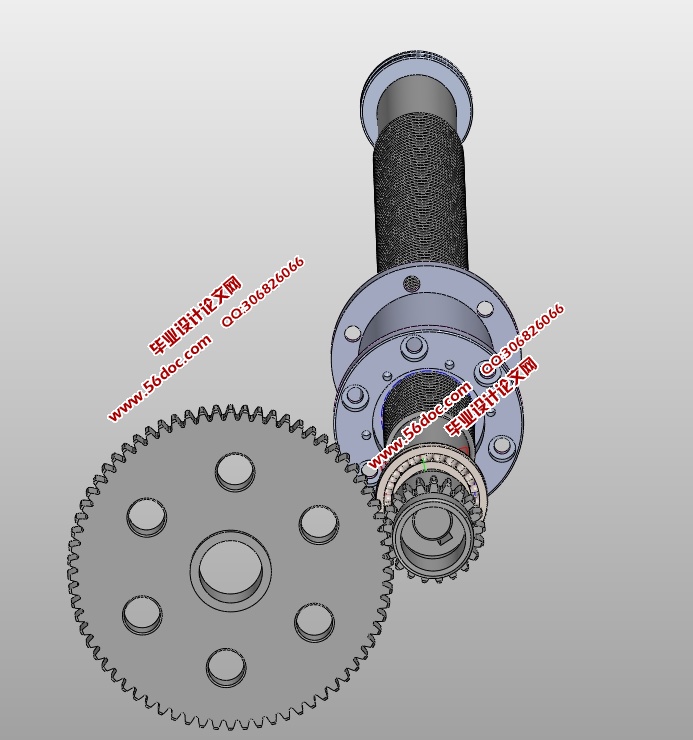
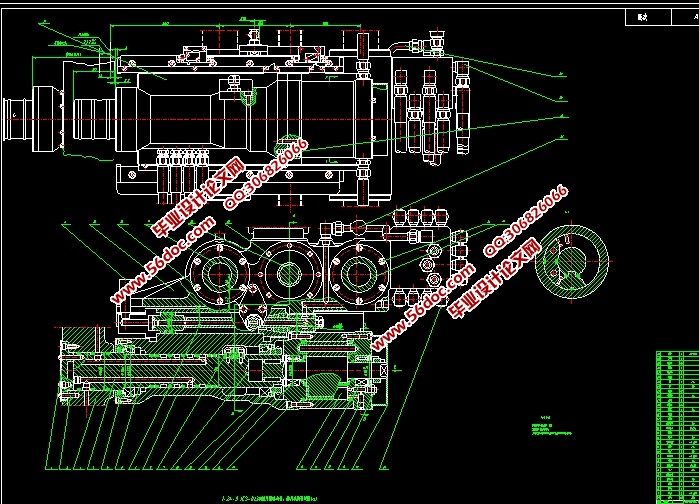
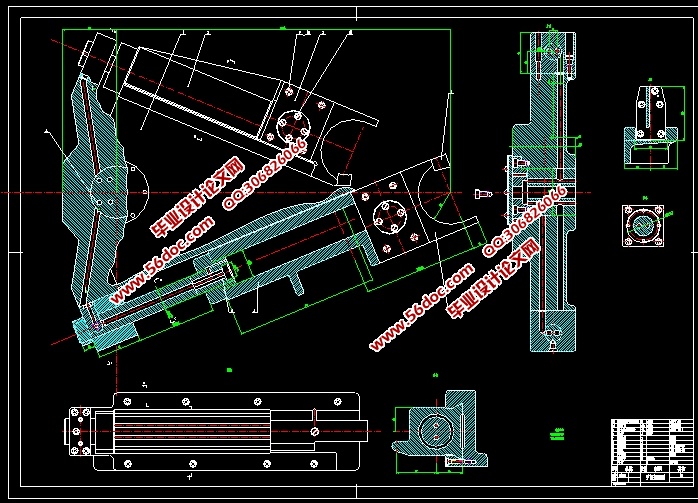
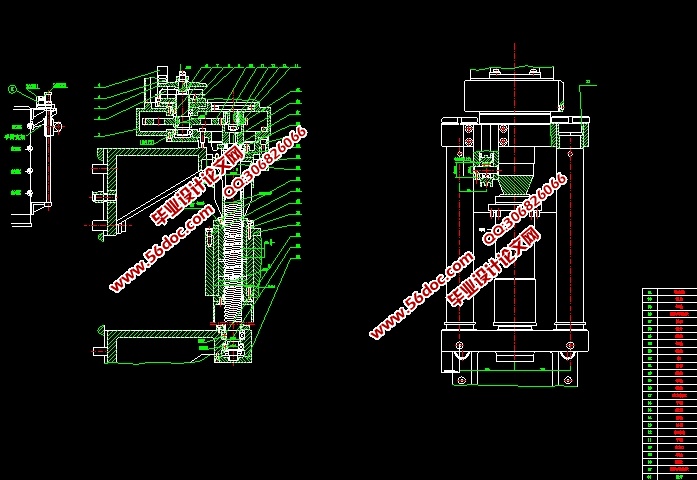
数控卧式镗铣床机械手升降机构由液动机、滚珠丝杠副、减速齿轮、摩擦片式电磁离合器等构成。分析刀库机械手升降机构的性能要求;分析刀库机械手升降机构的工作原理,进行结构设计和计算分析;数控卧式镗铣床机械手回转与装卸刀机构用于主轴和刀库间的装刀与卸刀操作,良好的结构设计能够实现刀库与机床主轴之间刀具的快速装卸。进行了回转与装卸刀机身的整体机构设计和回转机构的设计,机械手手架选择双臂单爪机械手结构,对其运动作了详细的分析,对机械手手架机构进行了设计计算。
关键词: 升降机构;回转与装卸刀机构;机械手手架;数控卧式镗铣床
ABSTRACT
CNC horizontal boring and milling machine is a automatic tool change device and arbitrary dividing point - linear digital control machine tool, nc rotary table after a clamping workpiece can automatically complete several side drilling, milling, Tang, reaming, tapping and other machining process. CNC horizontal Tang development and application of the milling machine, greatly reduces the parts processing auxiliary time, greatly improving the production efficiency, the development of numerical control horizontal machine tool has become the current widely used a more novel, more advanced manufacturing equipment.
CNC horizontal boring and milling machine is composed of liquid motive, ball screw pair, reduction gear and friction disc electromagnetic clutch. To analyze the performance requirements of the manipulator lifting mechanism; This paper analyzes the working principle of the manipulator lifting mechanism, and carries out the structure design and calculation analysis. CNC horizontal boring and milling machine mechanical rotary tool used in the spindle with loading and discharging and unloading is a knife and knife between knife library operation, good design can achieve dao library between the spindle and the cutting tool for quick loading and unloading. The fuselage of the overall organization design and the design of the slewing mechanism, mechanical hand choose manipulator arms single claw structure, the movement has made the detailed analysis of calculation in design of robot hand frame mechanism.
Keywords: lifting mechanism; Turning and loading and unloading mechanism; Manipulator holder; CNC horizontal boring and milling machine
目录
摘 要 I
ABSTRACT II
1.绪论 1
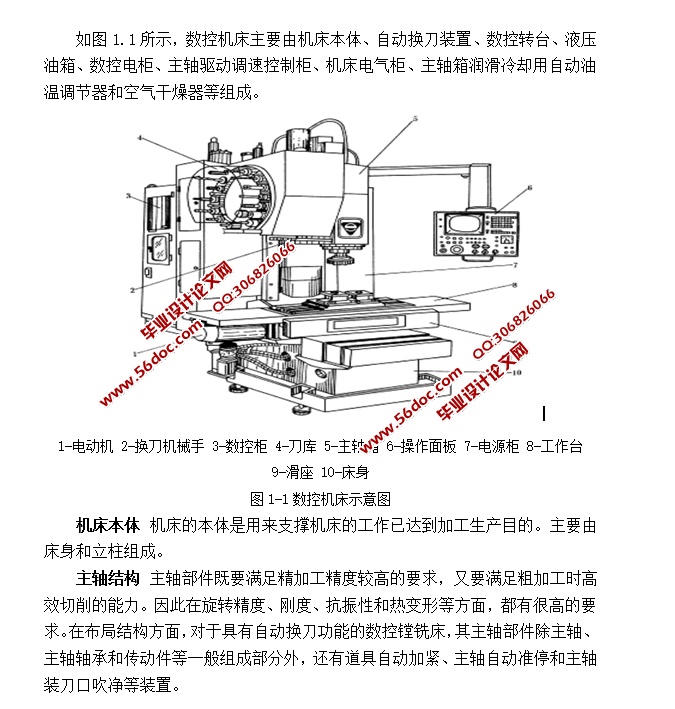
1.1数控镗铣床的结构组成 1
1.2国内外数控机床的发展 2
2.数控卧式镗铣床机械手升降机构设计 5
2.1机械手升降机构的组成和运动过程 5
2.2液动机的选择 6
2.3滚珠丝杆副的选用 10
2.4摩擦片式电磁离合器的设计和计算 15
3.数控卧式镗铣床机械手回转与装卸刀机构设计 17
3.1回转与装卸刀机构的组成和运动 17
3.2机械手回转与装卸刀的整体设计 18
4.数控卧式镗铣床机械手手架机构设计 21
4.1机械手手架的组成和运动 21
4.2机械手手部的结构设计 22
5.结论 29
参考文献 30
附录1 外文译文 31
附录2 外文原文 44
致谢 51
|
