下肢关节康复医疗器械的设计(含CAD零件装配图)(论文说明书17000字,CAD图纸6张)
摘 要
康复机器人技术则是近年来迅速发展的一门新兴机器人技术,是机器人技术在医学领域的新应用;目前康复机器人已成为国际社会研究的热点之一。本课题主要研究的基于姿态控制步态康复训练系统的设计。
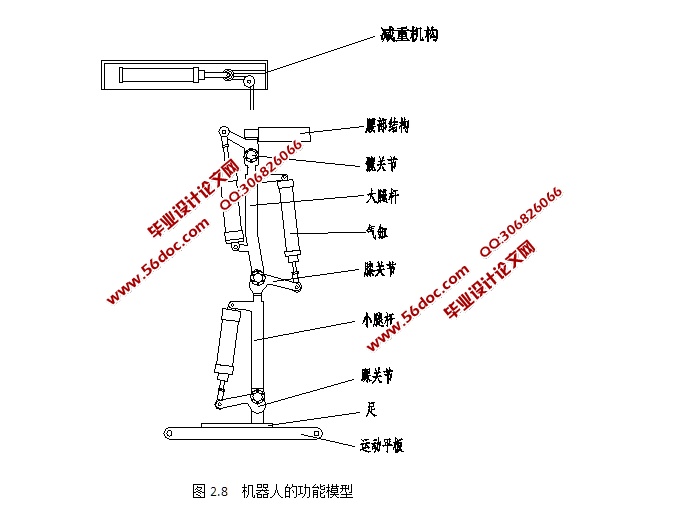
本文介绍了下肢康复机器人国内外发展现状和应用情况,进行了步态训练机器人的总体方案设计、结构设计,和总体控制方案设计等;对步态训练机器人进行三维建模,并对重要零件进行校核。本步态训练机器人共有7个自由度,其中每一条机械腿上有3个关节(3个自由度)模仿人体腿上的踝关节、膝关节、髋关节和一个用于减重的减重系统(包括1个自由度)。此系统能用于脑损伤、中风等病人的步态康复训练,帮助病人更好地进行康复训练,减轻他人的帮助,挺高效果。
关键词:康复训练;机器人;步态
ABSTRACT
The rehabilitation robot technology is a new robot technology developed rapidly recently, which is a new application in medical fields of robot technology. Currently the research on rehabilitation robot has been one of the focuses in the International Society. The rehabilitation robot technology is a synthesis of many subjects, which covers mechanics, electronics, control and rehabilitative medicine and so on; it has been a typical representation of the mechatronics research. The main research of this paper is based on the attitude control gait rehabilitation training system design.
In this paper, lower extremity rehabilitation and development of robot applications at home and abroad, a gait training robot's overall programme design, structural design, design and overall control; gait training on the robot for three-dimensional modeling, and important parts to check. The robot gait training has a total of seven degrees of freedom, each of which a mechanical leg joints have three (3 DOF) to imitate human leg ankle, knee, hip and a weight relief for weight relief system (including a degree of freedom). The system can be used for brain injury, stroke, and to help patients better rehabilitation training, and meets.the needs of different groups of people.
Key words:rehabilitation training; robot; gait



目 录
第1章 绪论 1
1.1 概述 1
1.2 康复机器人的国内外研究现状 2
1.3 本课题主要研究内容 7
第2章 总体方案设计与选择的论证 8
2.1 步态分析 8
2.2 方案的选择 11
2.2.1 自由度的设计 13
2.2.2 基本参数的选取 13
2.2.3 驱动器的选择 14
2.2.4 关节结构的选择 14
2.2.5 连杆结构的选择 14
2.2.6 腰部结构设计 15
2.2.7 减重机构 15
2.2.8 整体结构设计 16
2.3 本章总结 16
第3章 机械结构的设计与计算及驱动元件选型 17
3.1 人体参数 17
3.2 各关节运动学分析 17
3.2.1踝关节的运动学分析 18
3.2.2 膝关节的运动学分析 18
3.2.3 髋关节的运动学分析 19
3.3 关节力矩分析 20
3.4 具体结构设计 21
3.4.1 关节结构的选择 21
3.4.2 连杆结构的选择 22
3.4.3 腰部结构设计 23
3.4.4 减重机构 23
3.4.5 整体结构设计 24
3.5 一些零件的设计和校核 25
3.5.1 轴承的选择及校核 25
3.5.2 气缸的选择 25
3.5.3 连杆的计算与校核 27
3.5.4 销轴的校核 29
3.5.5 双头螺柱的校核 30
3.5.6 传感器的选取 30
3.6 减重系统分析及相关计算 31
3.7 本章小结 32
第4章 供气与控制系统的设计 33
4.1 供气系统的设计 33
4.1.1 供气回路设计 33
4.1.2 气动元件的选择 34
4.2 康复机器人的训练方式 39
4.3 气动自动控制方框图 39
4.4 本章小结 40
结 论 41
参考文献 42
致 谢 45
|
