ЕЙСЂАкЛњЕчПижЦЯЕЭГНсЙЙЩшМЦ(КЌCADСуМўзАХфЭМ,SolidWorksШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ12000зж,CADЭМжН12еХ,SolidWorksШ§ЮЌЭМ)
еЊ вЊ
ЫцзХЯжДњПЦбЇММЪѕЕФПьЫйЗЂеЙЃЌПижЦЙЄГЬЫљУцСйЕФЮЪЬтдНРДдНИДдгЁЃаэЖрЯЕЭГОпгабЯжиЗЧЯпадЁЂФЃаЭВЛШЗЖЈЁЂДѓжЭКѓЕШЬиЕуЁЃЕЙСЂАкОЭЪЧетбљЕФИДдгЯЕЭГЃЌЖдЫќЕФбаОПОпгавЛАуадЁЃЕЙСЂАкдДгкЛ№М§ЗЂЩфЦїЃЌзюГѕЕФбаОППЊЪМгкЖўЪЎЪРМЭ50 ФъДњЃЌгЩУРЙњТщЪЁРэЙЄбЇдКЕФПижЦРэТлзЈМвИљОнЛ№М§ЗЂЩфжњЭЦЦїдРэЩшМЦГівЛМЖЕЙСЂАкЪЕбщЩшБИЁЃЕЙСЂАкЕФПижЦММЧЩЭЌдгММдЫЖЏдБЕЙСЂЦНКтБэбнгавьЧњЭЌЙЄжЎДІЃЌетБэУївЛИіВЛЮШЖЈЕФБЛПиЖдЯѓЃЌЭЈЙ§ШЫЕФжБОѕЁЂВЩШЁЖЈадЕФЪжЖЮЃЌПЩвдЪЙжЎОпгаСМКУЕФЮШЖЈадЁЃдкПижЦРэТлЕФЗЂеЙЙ§ГЬжаЃЌФГвЛРэТлЕФе§ШЗадМАЦфдкЪЕМЪгІгУжаЕФПЩааадашвЊвЛИіАДЦфРэТлЩшМЦЕФПижЦЦїШЅПижЦвЛИіЕфаЭЖдЯѓРДбщжЄЁЃЕЙСЂАкЯЕЭГзїЮЊвЛИіЪЕбщзАжУЃЌаЮЯѓжБЙлЃЌНсЙЙМђЕЅЃЌГЩБОЕЭСЎЃЛзїЮЊвЛИіПижЦЖдЯѓЃЌЫћгжЯрЕБИДдгЃЌЭЌЪБОЭЦфБОЩэЖјбдЃЌЪЧвЛИіИпНзДЮЁЂВЛЮШЖЈЁЂЖрБфСПЁЂЗЧЯпадЁЂЧПёюКЯЯЕЭГЃЌжЛгаВЩШЁаажЎгааЇЕФПижЦЗНЗЈВХФмЪЙжЎЮШЖЈЃЌвђДЫЕЙСЂАкзАжУБЛЙЋШЯЮЊЪЧздЖЏПижЦРэТлжаЕФЕфаЭЪЕбщЩшБИЁЃ
ЭЈЙ§ЖдЕЙСЂАкЯЕЭГЕФбаОПЃЌВЛНіПЩвдНтОіПижЦжаЕФРэТлЮЪЬтЃЌЛЙФмНЋПижЦРэТлЫљЩцМАЕФШ§ИіЛљДЁбЇПЦЃКСІбЇЁЂЪ§бЇКЭЕчбЇгаЛњЕФНсКЯЦ№РДЃЌдкЕЙСЂАкЯЕЭГжаНјаазлКЯгІгУЁЃЖдЕЙСЂАкЯЕЭГНјааПижЦЃЌЦфЮШЖЈаЇЙћЗЧГЃУїСЫЃЌПЩвдЭЈЙ§НЧЖШЁЂЮЛвЦКЭЮШЖЈЪБМфжБНгЖШСПЃЌПижЦКУЛЕвЛФПСЫШЛЁЃРэТлЪЧЙЄГЬЕФЯШЕМЃЌЖдЕЙСЂАкЕФбаОПВЛНігаЦфЩюдЖЕФРэТлвтвхЃЌЛЙгаживЊЕФЙЄГЬБГОАЁЃДгШеГЃЩњЛюжаЫљМћЕНЕФШЮКЮжиаФдкЩЯЃЌжЇЕудкЯТЕФПижЦЮЪЬтЃЌЕНПеМфЗЩааЦїКЭИїРрЫХЗўдЦЬЈЕФЮШЖЈЃЌЖМКЭЕЙСЂАкЕФПижЦгаКмДѓЕФЯрЫЦадЃЌЙЪЖдЦфЕФЮШЖЈПижЦдкЪЕМЪжагаКмЖргУГЁЃЌШчКЃЩЯзъОЎЦНЬЈЕФЮШЖЈПижЦЁЂЮРаЧЗЂЩфМмЕФЮШЖЈПижЦЁЂЛ№М§зЫЬЌПижЦЁЂЗЩЛњАВШЋзХТНЛЏЙЄЙ§ГЬПижЦЕШЖМЪєгкетРрЮЪЬтЁЃеыЖдЩЯУцЕФЪЕМЪЮЪЬтЃЌЦєЗЂСЫШЫУЧВЩгУжЧФмПижЦЗНЗЈЖдЕЙСЂАкНјааПижЦвђДЫЖдЕЙСЂАкЛњРэЕФбаОПОпгаживЊЕФРэТлКЭЪЕМЪвтвхЃЌГЩЮЊПижЦРэТлжаООУВЛЫЅЕФбаОППЮЬтЁЃ
ЙиМќДЪЃКЕЙСЂАкЯЕЭГ ПижЦЖдЯѓ ЧПёюКЯЯЕЭГ БфСП
Inverted pendulum electromechanical control system structure design specification
absraote
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do somethingЃЌaslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.
The inverted pendulum is a typical high order system, with multi- variable, non-linear,
strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum LQR. First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weight matrix Q, R by using genetic algorithm in order to attain the system
state feedback control matrix. Finally, the simulation of the system is made by MATLAB. After several test matrix Q value the results are not satisfactory response, then we optimize Q matrix by using Genetic Algorithm. Simulation results show: The system response can meet the design requirements effectively after Genetic Algorithm optimization.
Small twisted paper broken machine for ordinary home, not only can be used for minced meat, can also be used with crushed peanuts, crushed ice, spices and other food, small power requirements, powered by the motor drive, reasonable structure design, can meet the family kitchen generally meat food consisting mainly of minced required.
Key word: pneumatic manipulatorЃЛcylinderЃЛpneumatic loopЃЛFour degrees of freedom.
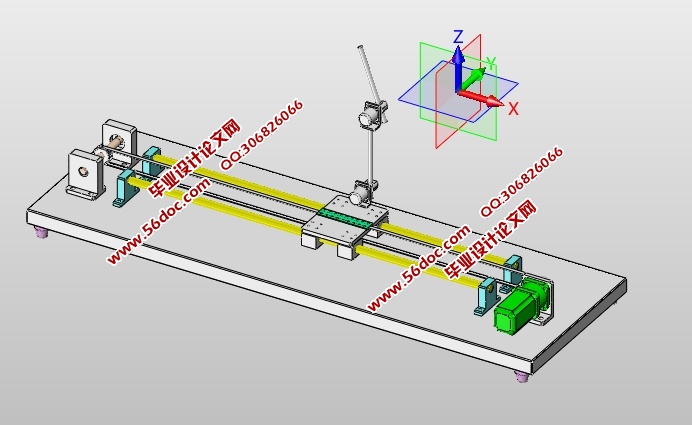
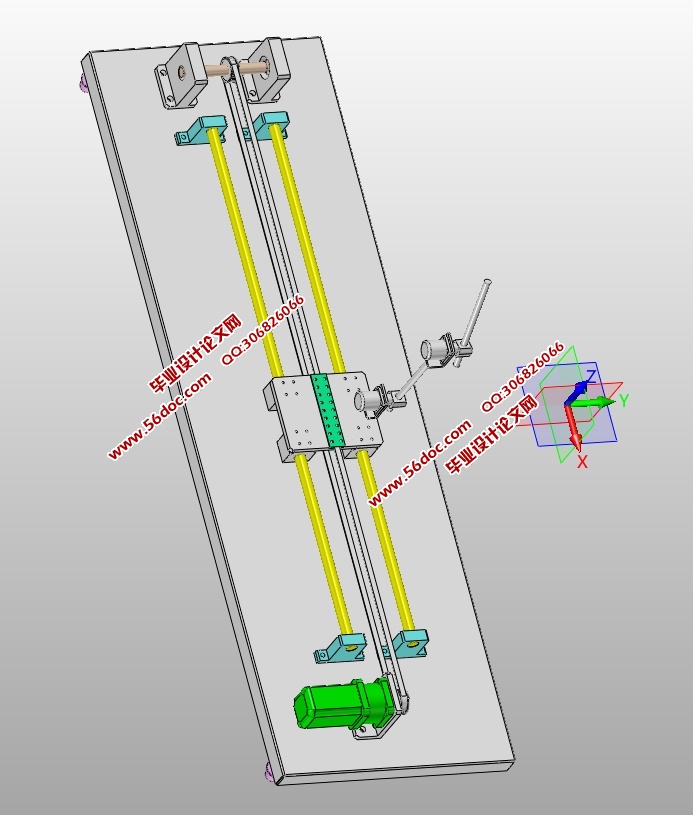
ЕЙСЂАкЯЕЭГЕФЙЄзїдРэ
ЕЙСЂАкЯЕЭГЭЈЙ§МЦЫуЛњЁЂI/OПЈЁЂЫХЗўЯЕЭГЁЂЕЙСЂАкБОЬхКЭЙтЕчТыХЬЗДРЁВтСПдЊМўзщГЩвЛИіБеЛЗЯЕЭГЁЃвджБЯпвЛМЖЕЙСЂАкЮЊР§ЃЌЦфЙЄзїдРэПђЭМШчЯТЭМЫљЪОЁЃЭМжаЙтЕчТыХЬ1гЩЫХЗўЕчЛњздДјЃЌаЁГЕЕФЮЛвЦПЩвдИљОнИУТыХЬЕФЗДРЁЭЈЙ§ЛЛЫуЛёЕУЃЌЫйЖШаХКХПЩвдЭЈЙ§ЖдЮЛвЦЕФВюЗжЕУЕНЁЃИїИіАкИЫЕФНЧЖШгЩЙтЕчТыХЬ2ВтСПВЂжБНгЗДРЁЕНI/OПЈЃЌЖјНЧЫйЖШаХКХПЩвдЭЈЙ§ЖдНЧЖШЕФВюЗжЕУЕНЁЃМЦЫуЛњДгI/OПЈЪЕЪБЖСШЁЪ§ОнЃЌШЗЖЈПижЦОіВпЃЈЕчЛњЕФЪфГіСІОиЃЉЃЌВЂЗЂИјI/OПЈЁЃI/OПЈОЙ§ЕчПиЯфФкВПЕчТЗВњЩњЯргІЕФПижЦСПЃЌЧ§ЖЏЕчЛњзЊЖЏЃЌЪЙаЁГЕАДПижЦвЊЧѓНјаадЫЖЏЃЌвдДяЕНПижЦФПЕФЁЃ
ЖдгкЖўМЖЛђИќЖрМЖЪ§ЕФЕЙСЂАкЃЌашвЊЯргІдіМгЙтЕчТыХЬвдМьВтИїАкИЫЕФНЧ ЖШЁЃЪЕМЪЯЕЭГХфжУжаЃЌПЩвдИљОнашвЊздааХфжУI/OПЈЁЂЫХЗўЕчЛњКЭЫХЗўЧ§ЖЏЦї
ЁЃ
ФПТМ
еЊвЊ..........................................................................................................2
Abstract................................................................................................2
ЕквЛеТ в§бд...........................................................................................3
1.1 ПЮЬтЕФбаОПБГОАКЭвтвх.......................................................................4
1.2ЕЙСЂАкЛњЕчПижЦЯЕЭГЕФЙњФкЭтбаОПИХПі..................................................4
1.3ЕЙСЂАкЯЕЭГМђНщ..................................................................................4
1.3.1ЕЙСЂАкЯЕЭГЕФЗжРр.........................................................................5
1.3.2ЕЙСЂАкЯЕЭГЕФЬиЕу.........................................................................5
1.3.3ЕЙСЂАкЯЕЭГПђЭМ............................................................................6
1.4ЕЙСЂАкЯЕЭГЕФЙЄзїдРэ......................................................................6
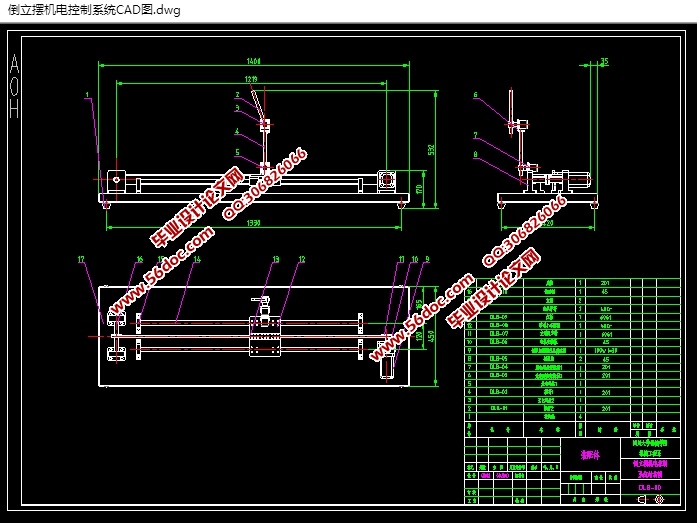
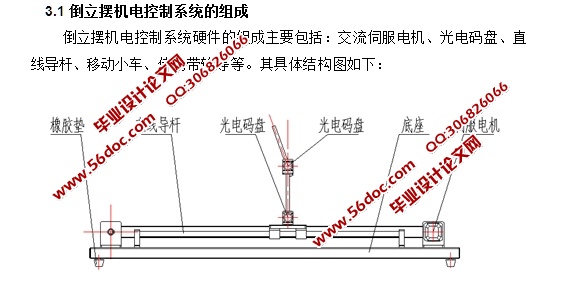
ЕкЖўеТЕЙСЂАкЛњЕчПижЦЯЕЭГНсЙЙЕФзмЬхЩшМЦ.................................7
2.1 ЕЙСЂАкЛњЕчПижЦЯЕЭГНсЙЙЕФЙІФмашЧѓ....................................................8
2.2 ЯЕЭГЪЕЯжНсЙЙЭМ.................................................................................9
ЕкШ§еТЕЙСЂАкЛњЕчПижЦЯЕЭГНсЙЙЩшМЦ............................................10
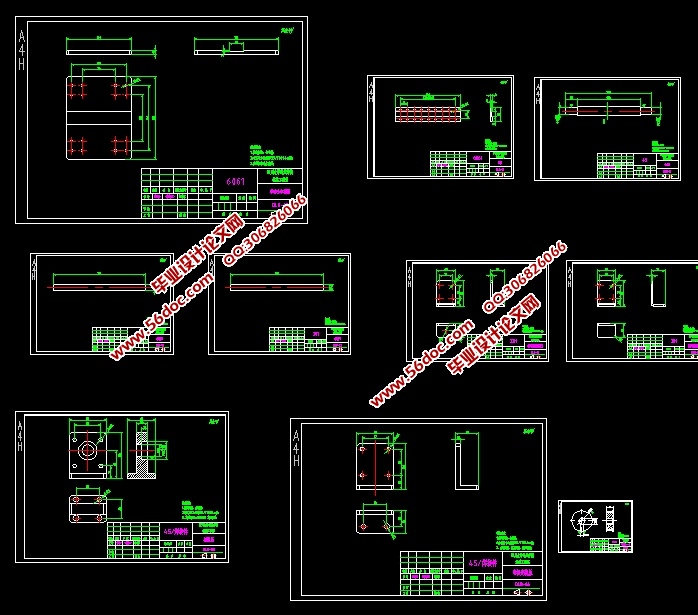
3.1ПижЦЯЕЭГЕФЙЙГЩ.................................................................................11
3.2ПижЦЯЕЭГгВМўЕчТЗКЫаФдЊМўЕФбЁдё....................................................11
3.2.1ЫХЗўЕчЛњЕФЙЄзїдРэМАбЁаЭМЦЫу..................................................12
3.2.2ЫХЗўЕчЛњЕФЙЄзїдРэ..................................................................12
3.2.3ЫХЗўЕчЛњЕФбЁаЭМЦЫу..................................................................13
3.3ЙтЕчТыХЬЕФЙЄзїдРэМАзїгУ................................................................13
3.3.1ЙтЕчТыХЬЕФЙЄзїдРэ..................................................................14
3.3.2ЙтЕчТыХЬЕФзїгУ........................................................................16
3.4жБЯпЕМИЫЕФбЁдё................................................................................17
3.5ЭЌВНДјТжДЋЖЏЕФбЁдёМЦЫу...................................................................20
ЕкЫФеТЕЙСЂАкЛњЕчПижЦЯЕЭГжаPIDЕФПижЦЫуЗЈЕФЪЕЯж..............22
4.1PIDПижЦЫуЗЈМђНщ..............................................................................25
4.1.2PIDПижЦИїВПЗжЕФЬиЕу.................................................................27
4.1.3PIDПижЦЦїИїВПЗжВЮЪ§ЕФбЁЖЈ........................................................29
4.2PIDПижЦЫуЗЈЕФЪЕЯж...........................................................................29
НсТл........................................................................................................30
жТаЛ........................................................................................................31
ВЮПМЮФЯз................................................................................................32
|
