农田施肥旋翼飞行机器人结构设计(含CAD零件装配图)(论文说明书19000字,CAD图纸8张)
THE STRUCTURE DESIGN OF THE FIELD FERTILIZATION ROTOR FLYING ROBOT
摘要
根据我国目前的农业发展前景,本身是一个农业大国,差不多有十八亿亩的农田面积。对于农田施肥这一方面还有很大改进的地方,目前大部分农田施肥都是依靠人工,工作效率低,而且撒化肥分布不均匀等情况。所以针对这一情况,结合本文设计的农田施肥旋翼飞行机器人,最主要的是能够代替人工劳动力,大大地提高农田施肥的效率。
根据本文设计的农用无人机,考虑到施肥这一主要关键词,本次所设计的是多旋翼施肥无人机,对于飞行机器人的旋翼支架、着落架、化肥箱和螺旋桨等部件进行更深入的探索,参考市场上已经出现的多旋翼无人机作出改进,结合本次设计题目的实际情况进一步优化。
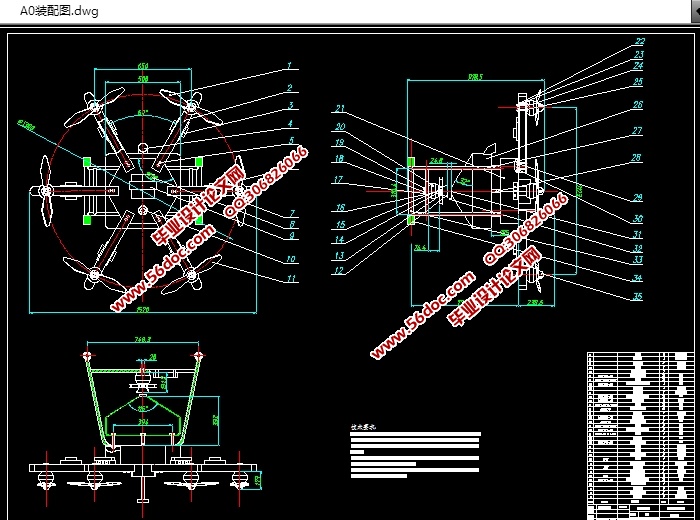
本文所设计的要求包括旋翼支架结构、化肥箱在飞行机器人的设计位置和撒化肥的机构等,在本次论文中有明确的说明,并给出CAD各部件的零件图和飞行机器人的模型装配图,实现了多转子飞行机器人的效率、标准化和实际应用。
关键词 旋翼飞行机器人;施肥;结构设计
Abstract
According to the current agricultural development prospect in China,Our country is a big agricultural country, China has about 1.8 billion mu of farmland area.There is a lot of improvement in the field of fertilization in the field,At present, most farmland fertilization relies on labor, low efficiency, and uneven distribution of fertilizer.Therefore, in view of this situation, combined with my design of farmland fertilization rotor flying robot, the most important is to be able to replace the artificial labor force, and greatly improve the efficiency of farmland fertilization.
According to the agricultural drone I designed, taking into account the main keyword of fertilization,This time I designed a multi-rotor fertilization uav.More in-depth exploration of the rotor support of the flying robot, the falling frame, the fertilizer box and the propeller, etc.The multi-rotor uav has been improved in reference market, and the actual situation of this design topic is further optimized.
The requirements I have designed include the rotor support structure, the design position of the fertilizer box in the flying robot, and the chemical fertilizer mechanism, etc.In this paper, there are clear instructions, and the assembly drawing of the parts drawing and flying robot of the CAD parts is given.The efficiency, standardization and practical application of multi-rotor flying robot are realized.
Keywords rotor flying robot fertilization structure design
六轴旋翼农用飞行机器人的基本结构设计
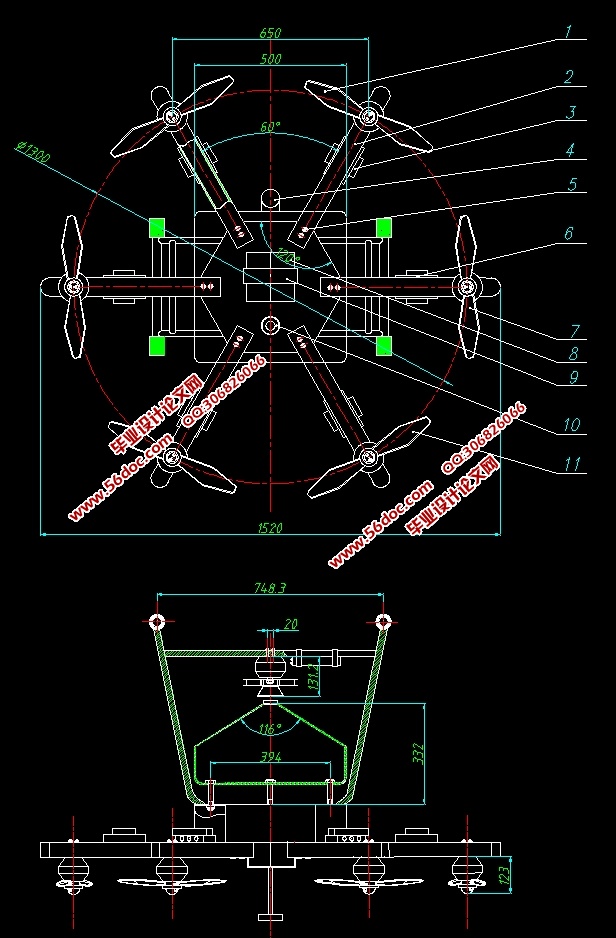
这次本文所设计的是一个适合农田、草原的六旋翼农用无人机撒化肥系统,浏览了一些参考文献和市场上已经出现的无人机结构,主要分析了六旋翼农用无人机的工作原理,本机型主要设计的是无人机的机体部分、飞行的控制系统和以蓄电池为动力的飞行动力系统。农用无人机机体部分指的是飞行机器人的主体,比如无人机的机架、起落架等,主体结构主要起连接和固定零件(包括便于装拆)的作用;动力部分指的是蓄电池、电机、螺旋桨等部分,它主要是提供动力,并进行农田植保作业;飞行控制系统指的是由遥控器(可以远程控制)、飞控器和接受信号装置组成的设备。还有在无人机上装置的撒化肥系统,它主要由化肥箱(包括漏口、和调节漏口大小的插板)、电机、撒盘组成。

目 录
摘要 I
Abstract II
1 绪论 1
1.1 农用飞行机器人的发展史 2
1.2 农田施肥旋翼飞行机器人的前景 5
1.3 多轴旋翼农用植保无人机更高效、更实用 6
1.4 农用多轴旋翼飞行机器人还需解决的问题 7
1.5 多轴旋翼农用无人机的注意事项 8
2 六轴旋翼农用飞行机器人的机身结构设计与施肥机构 9
2.1 六轴旋翼农用飞行机器人的基本结构设计 9
2.1.1 六轴旋翼农用飞行机器人的整体设计 9
2.1.2 六轴旋翼农用飞行机器人撒化肥系统设计与其工作原理 10
2.2 六轴旋翼农用飞行机器人的自平衡原理 12
3 无人机的动力系统设计与其工作原理 14
3.1 基本结构 14
3.2 动力电机与调速系统 15
3.2.1 电机 15
3.2.2 电调 16
3.2.3 飞行控制器 17
3.3 电机的主要参数和续航时间的计算 17
3.3.1 六轴旋翼农用无人机的电机选择 18
3.3.2 估算六轴旋翼无人机的飞行工作时间 18
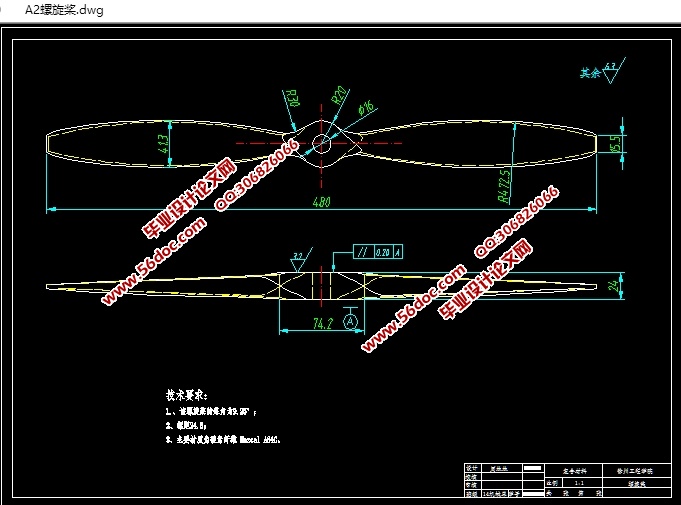
4 无人机的螺旋桨设计 20
4.1 影响螺旋桨的几何参数 20
4.2 螺旋桨材料的选择 21
4.3 无人机螺旋桨的运动特性 22
4.3.1 螺旋桨的转速 22
4.3.2 螺旋桨前进的速度 22
4.3.3 螺旋桨旋转一周的距离 22
4.4 无人机螺旋桨的动力学特性 22
4.4.1 螺旋桨的拉力和拉力系数 22
4.4.2 螺旋桨的扭矩和扭矩系数 23
4.4.3 螺旋桨的功率和功率系数 23
4.4.4 螺旋桨的前进比 24
4.4.5 螺旋桨的效率 24
4.5 无人机机型与电机、螺旋桨之间的关系 24
5 PCB控制板、陀螺仪、遥控器的应用 25
5.1 六轴转子旋转与无人机飞行的原理 25
5.2 六轴旋翼农用无人机陀螺仪的应用 26
5.3 无人机的遥控器 26
结论 28
致谢 29
参考文献 30
|
