四自由度搬运机械手的设计与运动仿真(含CAD装配图,UG三维图)(外文翻译,论文说明书12000字,CAD图1张,UG三维图,仿真视频)
摘要
在机械制造业中,机械手已被广泛应用,改善了工人的劳动环境,显著地加快了生产节奏,提高了劳动生产率,工业生产的机械化和自动化程度得到了提高。
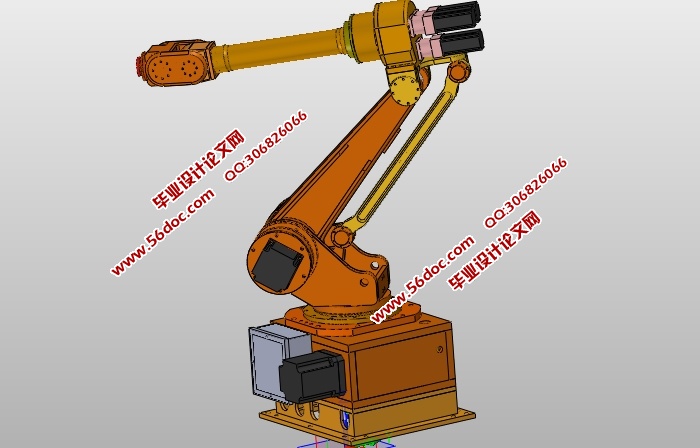
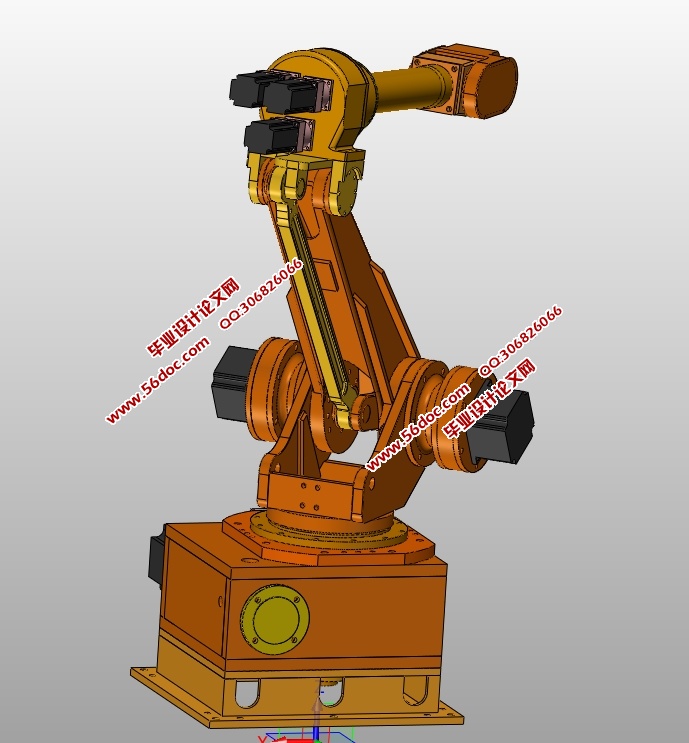
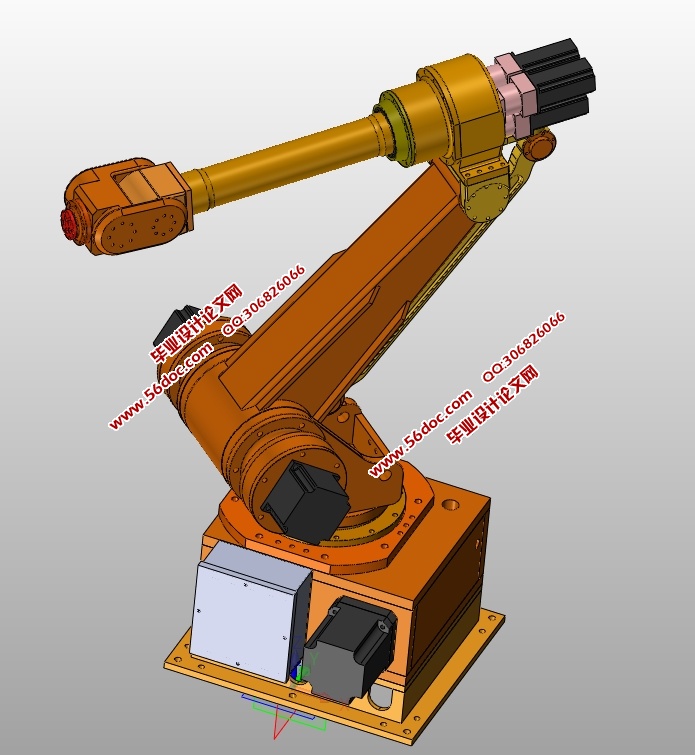
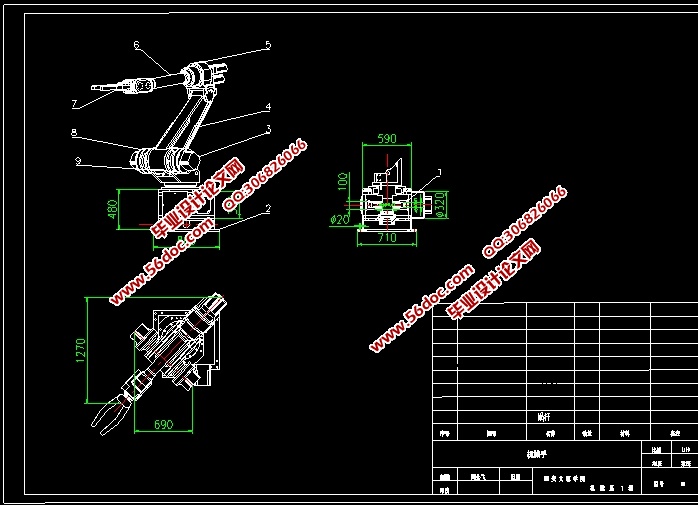
本文先对机械手的国内外研究现状以及搬运机械手的应用背景和需求分析进行分析,对本课题任务进行了四自由度搬运机械手的总体方案设计。首先,确定了搬运机械手的自由度为四自由度;其次,本文设计了四自由度搬运机械手的夹持式手部结构、手臂结构、机身、机座、驱动系统等部分,实现了四自由度搬运机械手的水平回转,轴向移动,竖直升降,手部的旋转四个自由度及手爪的开合。本文通过针对四自由度搬运机械手的整体设计,设计出了一种具有模块化、高可靠性物料的搬运机械手,对其他经济型搬运机械手的设计也有一定的借鉴作用。
关键词:四自由度;机械手;气动驱动;运动学仿真
Abstract
In machinery manufacturing, robots have been widely used to improve workers' labor environment, significantly speed up production, increase labor productivity, and increase the degree of mechanization and automation of industrial production.
This paper first analyzes the research status of manipulators both at home and abroad, as well as the application background and demand analysis of the handling robots. The overall program design of the four-degree-of-freedom transport manipulator is performed on the tasks of this project. Firstly, the degree of freedom of the handling robot is determined to be four degrees of freedom. Secondly, this paper designs the gripping hand structure, arm structure, fuselage, frame and drive system of the four-degree-of-freedom handling robot and realizes four freedoms. Degree of rotation of the handling robot, axial movement, vertical lifting, four degrees of rotation of the hand and the opening and closing of the hand. In this paper, by designing the overall design of a four-degree-of-freedom handling robot, a handling robot with a modular, high-reliability material is designed, which also has a certain reference for the design of other economical handling robots.
Keywords: four degrees of freedom; manipulator; pneumatic drive; kinematics simulation
整体方案
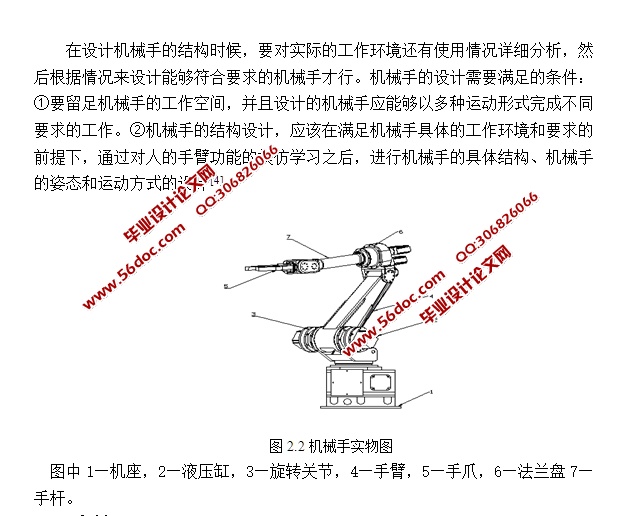
在设计机械手的结构时候,要对实际的工作环境还有使用情况详细分析,然后根据情况来设计能够符合要求的机械手才行。机械手的设计需要满足的条件:①要留足机械手的工作空间,并且设计的机械手应能够以多种运动形式完成不同要求的工作。②机械手的结构设计,应该在满足机械手具体的工作环境和要求的前提下,通过对人的手臂功能的模仿学习之后,进行机械手的具体结构、机械手的姿态和运动方式的设计[4]。

目录
第1章 绪论 1
1.1选题背景及研究意义 1
1.2 机械手概述 1
1.3 国内外发展现状 2
1.3.1国外机械手发展现状 2
1.3.2国内机械手发展现状 2
1.4课题的主要研究内容 3
第2章 四自由度搬运机械手的总体方案设计 4
2.1工作原理 4
2.2 基本参数要求 4
2.2.1基本参数的确定 4
2.2.2设计要求 5
2.3整体方案 5
2.4小结 6
第3章 四自由度搬运机械手的机械结构设计 7
3.1底座的设计 7
3.2手部的设计 7
3.2.1机械手手部结构的计算 7
3.2.2竖直升降模块的设计 8
3.2.3水平伸缩模块的设计 9
3.3腕部的设计 10
3.3.1 概述 10
3.3.2 手腕驱动力矩的确定 10
3.4臂部的设计 12
3.4.1手臂运动机构的选择 12
3.4.2手臂偏重力矩的确定 12
3.5小结 13
第4章 四自由度机械手驱动系统设计 14
4.1气动元件的选用 14
4.2气动系统中各控制和辅助元件的选用 15
4.2.1方向控制阀的选用 15
4.2.2流量控制阀的选用 16
4.2.3压力控制阀的选用 16
4.3液压模块计算 16
4.3.1 液压缸活塞的驱动力的计算 16
4.3.2液压缸的结构尺寸 19
4.4活塞杆的设计 21
4.4.1活塞杆的计算 21
4.4.2活塞杆的稳定性校核 21
4.5手臂旋转设计 23
4.6 手臂升降设计 25
4.6.1臂部做升降运动时油缸的相关计算 26
4.6.2油缸内径的计算 26
4.6.3油缸壁厚 的计算 27
4.6.4活塞杆的计算 28
4.7小结 29
第5章 四自由度机械手液压系统设计 30
5.1机械手液压缸的受力情况 30
5.1.1 大臂升降缸的受力情况 30
5.1.2 手爪夹紧缸的受力情况 30
5.1.3 手臂伸缩缸的受力情况 30
5.2液压元件的选择 30
5.3液压系统原理图 31
5.4小结 31
第6章结论 33
致谢 34
参考文献 35
附录 36
|
