舰船表面喷漆机器人的结构设计(含CAD零件装配图)
来源:wenku7.com 资料编号:WK715068 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK715068

资料介绍
舰船表面喷漆机器人的结构设计(含CAD零件装配图)(任务书,外文翻译,设计说明书17700字,CAD图8张) 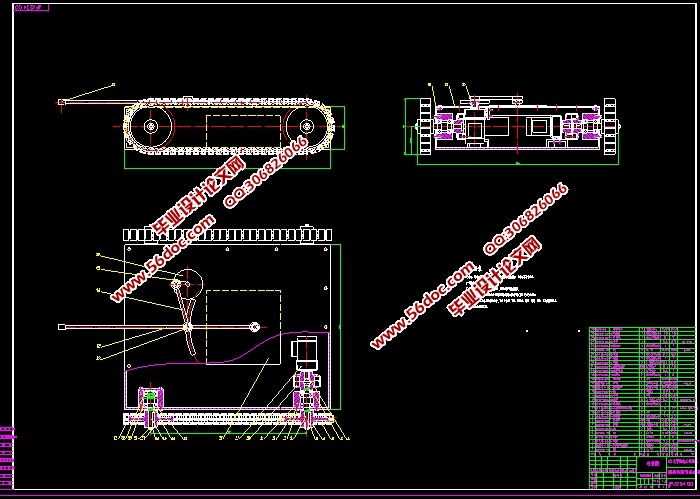 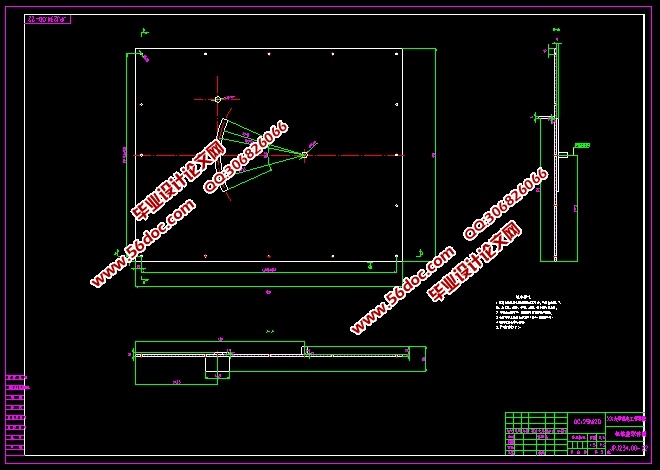 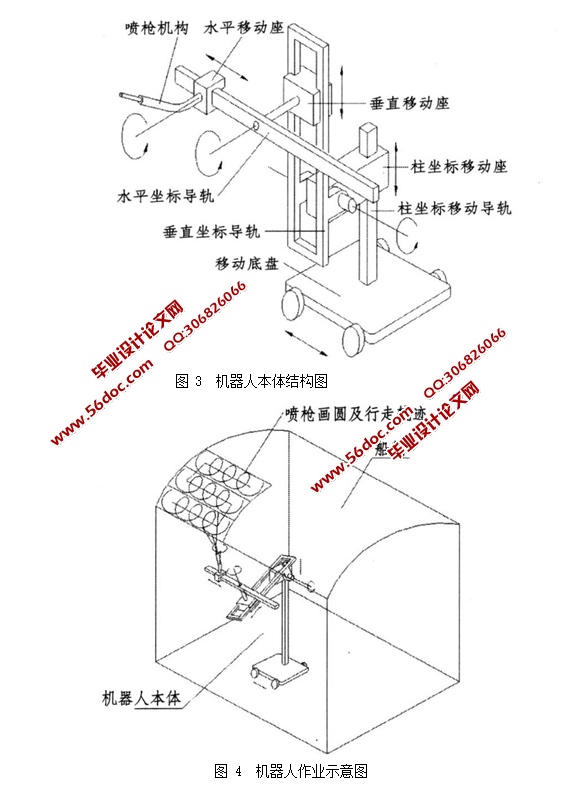 
|
舰船表面喷漆机器人的结构设计(含CAD零件装配图)(任务书,外文翻译,设计说明书17700字,CAD图8张)
|