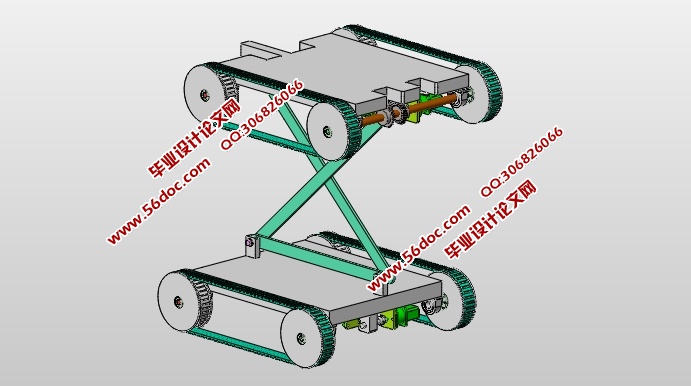
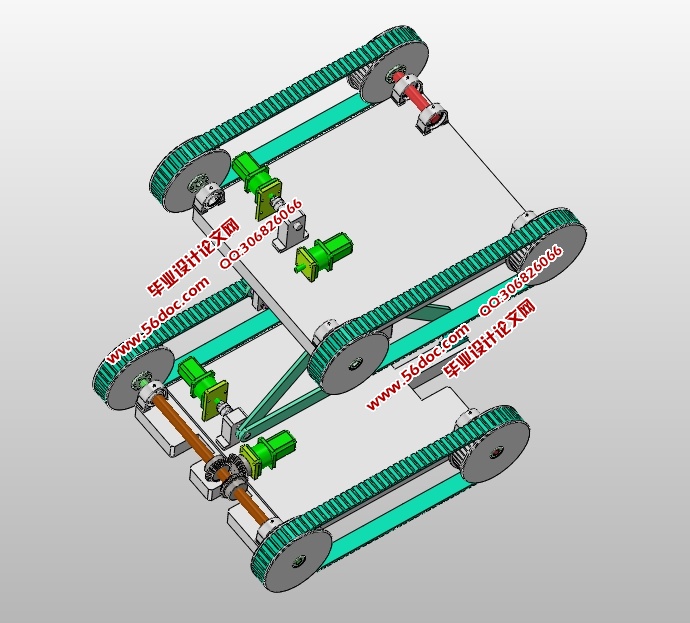
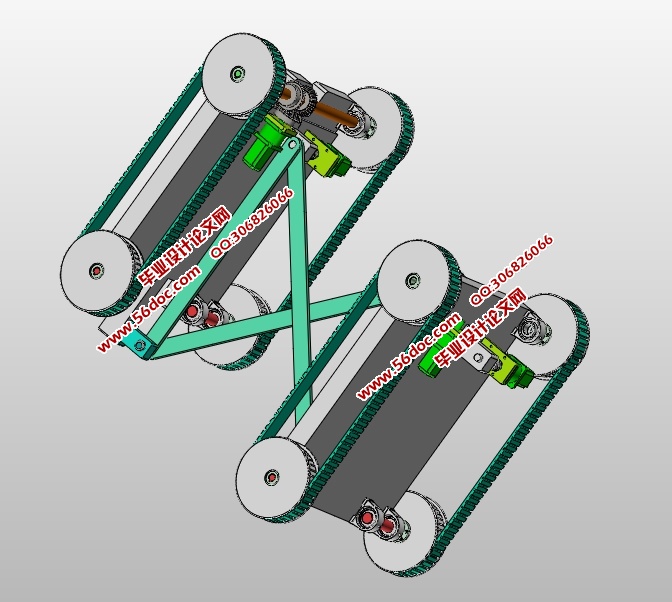
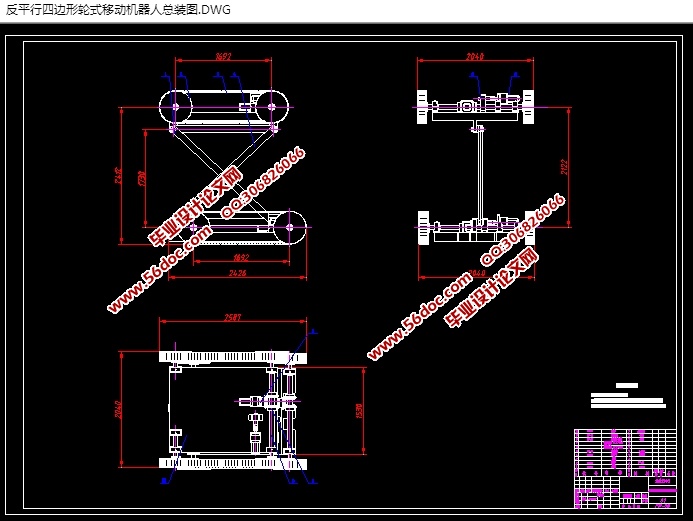
反平行四边形轮式移动机器人的设计(含CAD图,SolidWorks三维图) 来源:wenku7.com 资料编号:WK715039 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK715039 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 反平行四边形轮式移动机器人的设计(含CAD图,SolidWorks三维图)(论文说明书10200字,CAD图8张,SolidWorks三维图) 摘 要 机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。 本文主要以反平行四边行机构为基础来设计反平行四边形轮式移动机器人的的整体方案。该机构采用统一动作、协调控制的原则,通过连杆的摆动来实现机器人主体的翻转从而进行越障的运动,该机器人以反平行四边形四连杆机构作为车体基本框架,翻转自身以适应不同地形。通过中控系统的控制来实现反平行四边形轮式移动机器人的动作,由于是中控系统控制,所以控制灵活,多样,并且可以实现一些人类靠自身无法完成的功能。 关键词:反平行四边形轮式移动机器人;工作;控制;功能 反平行四边形轮式移动机器人的总体方案图 本次设计的反平行四边形轮式移动机器人采取的方案是:机器人的布局分为上、下两层,通过反平行四边型机构相连接,通过伺服电机驱动圆锥齿轮传动来实现机器人的翻转动作,从而来实现不同的地形的需要。根据控制方法的不同,机器人的翻转角度也有所不同。整机采用成本低廉且经久耐用的碳钢板作为主体材料,经过喷漆喷塑处理后在外观上面得到了一定的保证。其具体方案布局图如下: 反平行四边形轮式移动机器人的工作原理 本次设计的反平行四边形轮式移动机器人的工作原理为:通过伺服电机驱动圆锥齿轮传动从而来带动反平行四边形的动作来实现机器人的翻转动作,从而来实现不同的地形的需要。根据控制方法的不同,机器人上部的翻转角度也有所不同,根据不同的路况,实现不同的功能。 该轮式移动机器人主要是以反平行四边形机构为主体,通过电机驱动连杆的摆动从而实现该机器人的越障功能。根据电机的转动圈数的不同,连杆的摆动角度也有所不同,该机器人的总体高度也有所变化。 目 录 摘 要 i ABSTRACT ii 目 录 iii 1 绪论 1 1.1 机器人简史 3 1.2 应用机器人的意义 6 1.3 本课题研究的内容 9 2 反平行四边形轮式移动机器人总体方案结构的设计 12 2.1 反平行四边形轮式移动机器人的总体方案图 12 2.2 反平行四边形轮式移动机器人的工作原理 12 3 机械结构的设计 18 3.1伺服电机的选型计算 20 3.2圆锥齿轮传动的选型计算 20 3.3传动轴的设计计算 21 4 各主要零部件强度的校核 22 4.1 圆锥齿轮的校核 22 4.2 传动轴强度的校核 23 4.3 轴承强度的校核 23 5 反平行四边形轮式移动机器人的三维建模 24 5.1 连杆的三维建模 25 5.2 伺服电机的三维建模 26 5.3 传动轴的三维建模 26 5.4 反平行四边形轮式移动机器人的三维建模 27 6 三维软件设计总结 27 结论 28 致 谢 29 参考文献 30