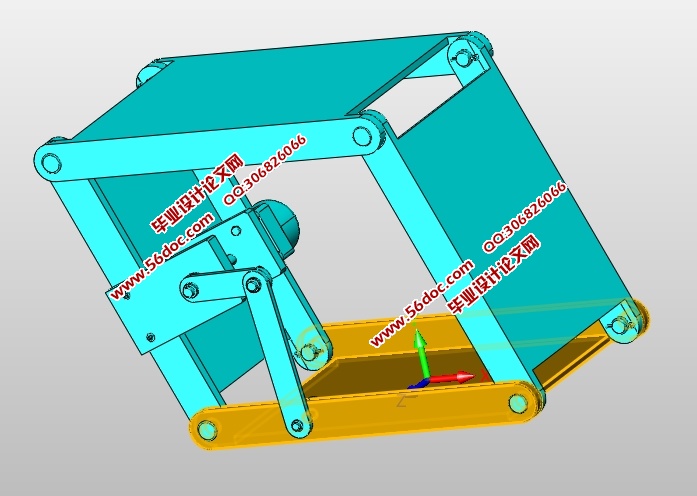
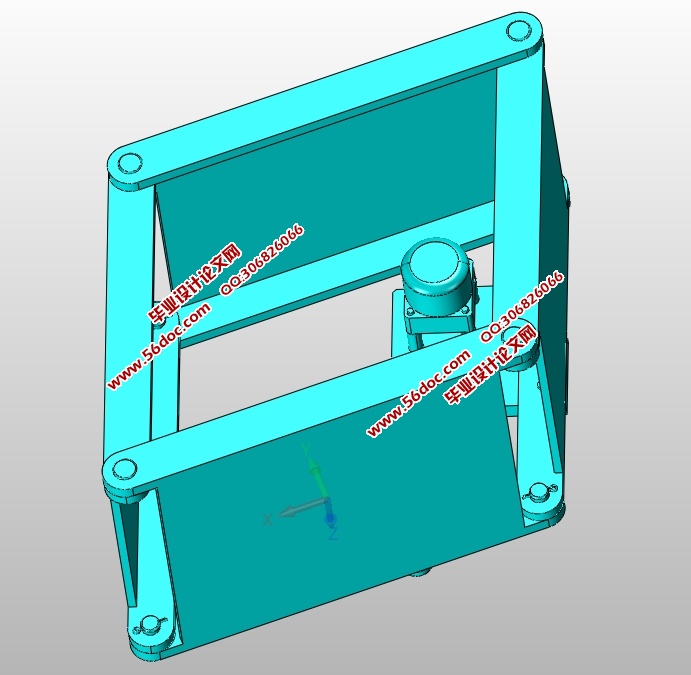
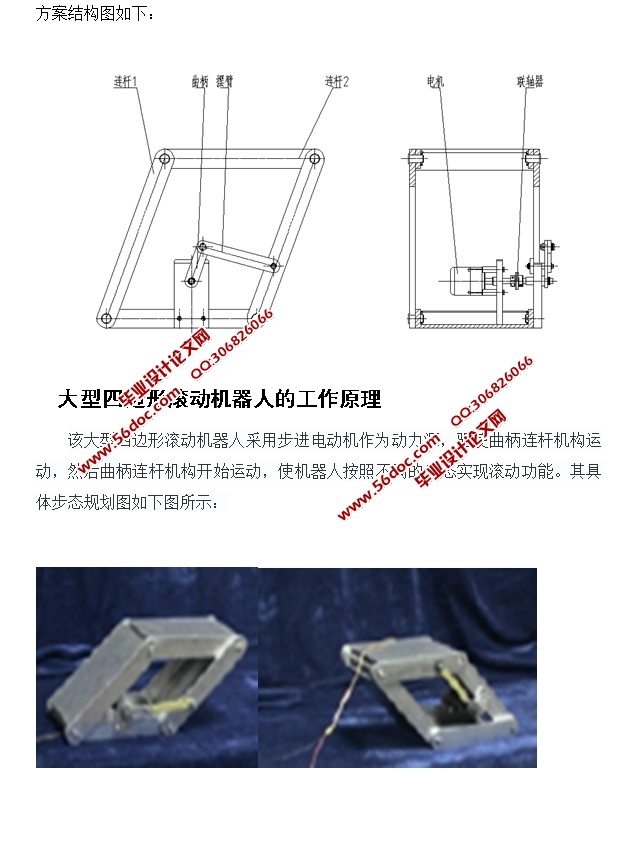
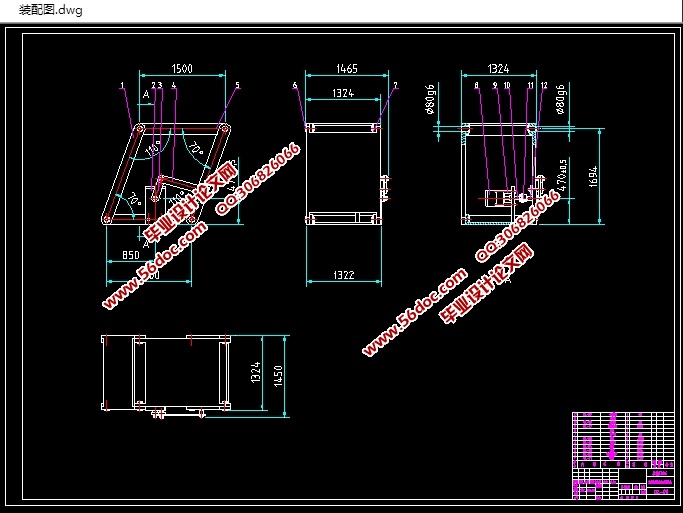
大型四边形滚动机器人的设计(含CAD图,SolidWorks,STEP三维图) 来源:wenku7.com 资料编号:WK715036 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK715036 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 大型四边形滚动机器人的设计(含CAD图,SolidWorks,STEP三维图)(论文说明书17000字,CAD图纸9张,SolidWorks三维图,STEP通用三维格式) 本毕业设计的目标是设计一种大型四边形滚动机构,该机构尺寸为大型,利用人体操作实现机构运动的控制。采用四杆机构作为设计基础,通过机构设计与仿真设计实现滚动功能。 关键词:大型四边形滚动机器人;结构;四杆机构;曲柄摇杆 大型四边形滚动机器人总体方案结构的设计 本次设计的大型四边形滚动机器人采取的方案是:采用碳钢板通过销轴连接的方式来制作主体,主体里面安装步进电动机作为动力源,驱使曲柄连杆机构运动,然后曲柄连杆机构开始运动,使得我的机器人的步行功效得以实现,其具体方案结构图如下: 大型四边形滚动机器人的工作原理 该大型四边形滚动机器人采用步进电动机作为动力源,驱使曲柄连杆机构运动,然后曲柄连杆机构开始运动,使机器人按照不同的步态实现滚动功能。 目 录 摘 要 i ABSTRACT ii 目 录 iii 1绪论 1 1.1课题来历与研究的目的以及意义 1 1.2大型四边形滚动机器人的发展现状 2 1.3本课题研究的内容 5 1.4 该机器人的Solidworks设计 7 1.4.1 草图绘制 9 1.4.2 基准特征,参考几何体的创建 10 1.4.3 拉伸、旋转、扫描和放样特征建 11 1.4.4 工程图的设计 12 1.4.5 装配设计 12 2 大型四边形滚动机器人总体方案结构的设计 12 2.1 大型四边形滚动机器人的总体方案图 12 2.2 大型四边形滚动机器人的工作原理 12 3 机械传动的设计计算 16 3.1 伺服电机的选型计算 16 3.2 传动轴的设计计算 17 3.3 轴承的设计计算 17 4 主要零部件的强度校核 18 4.1 传动轴强度的校核 19 4.2 轴承强度的校核计算 19 结论 19 致 谢 20 参考文献 21 附录 一 32 附录 二 40