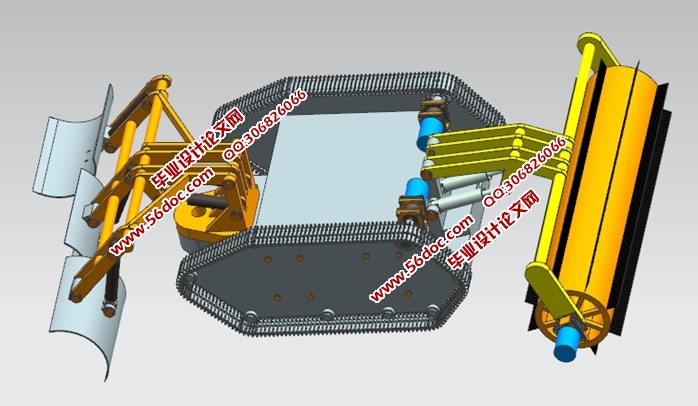
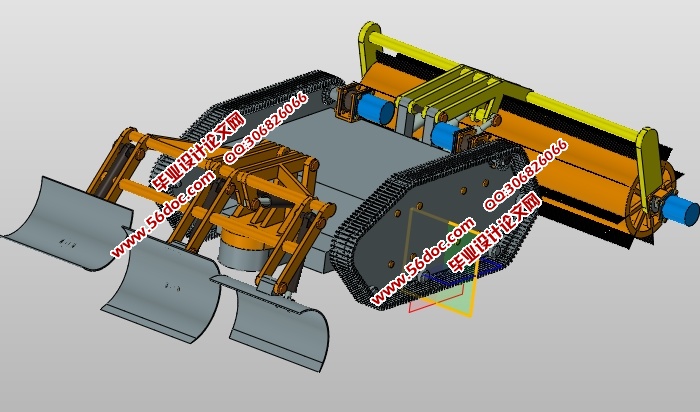
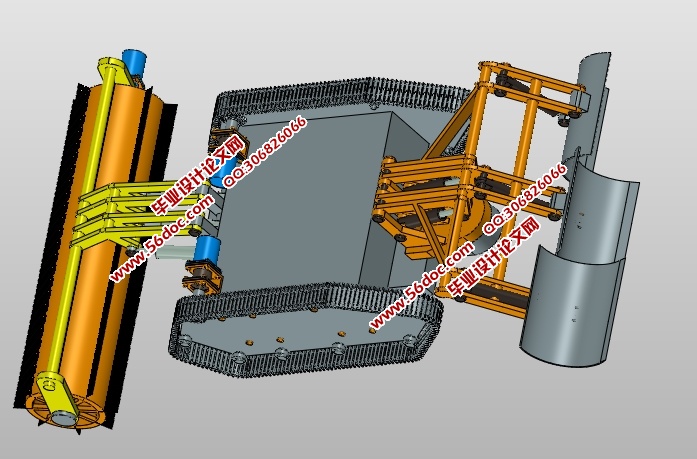
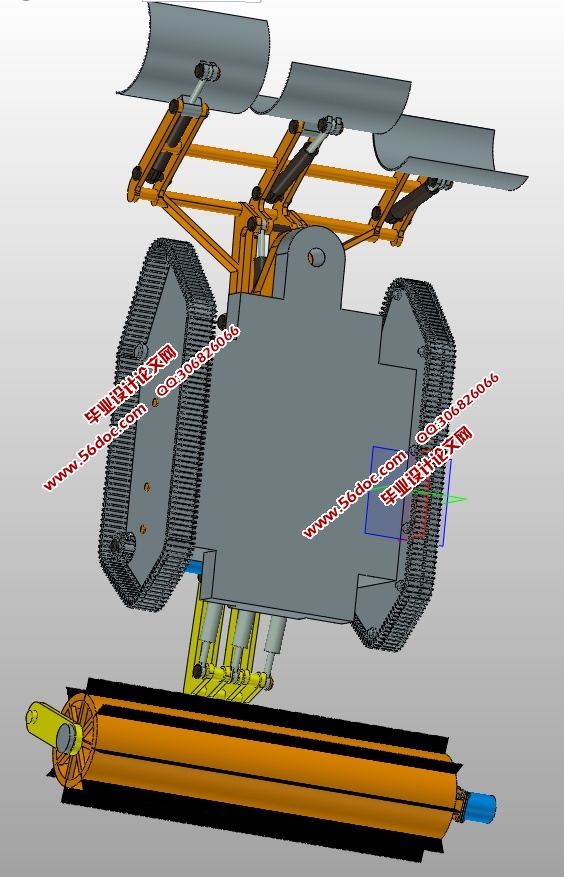
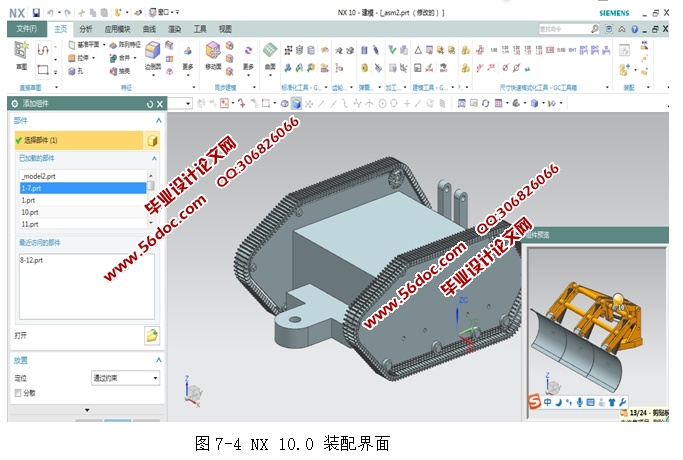
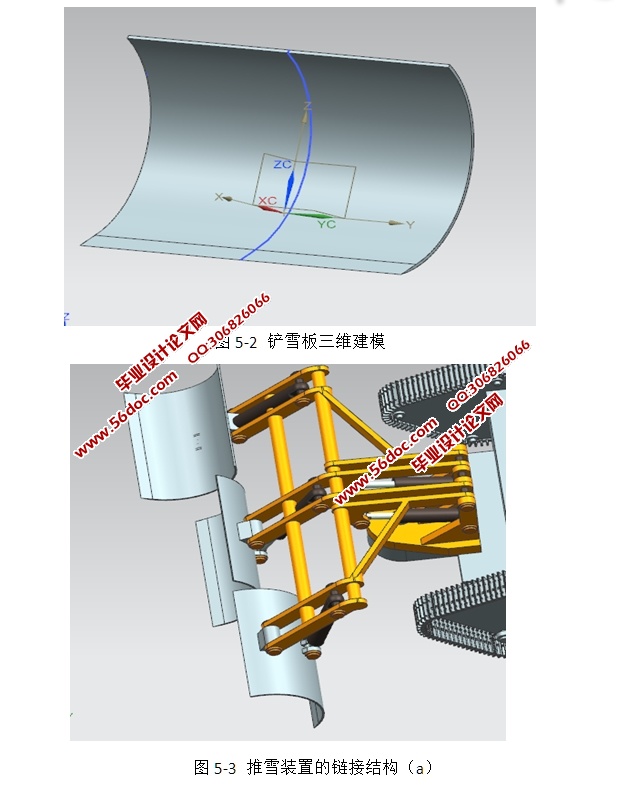
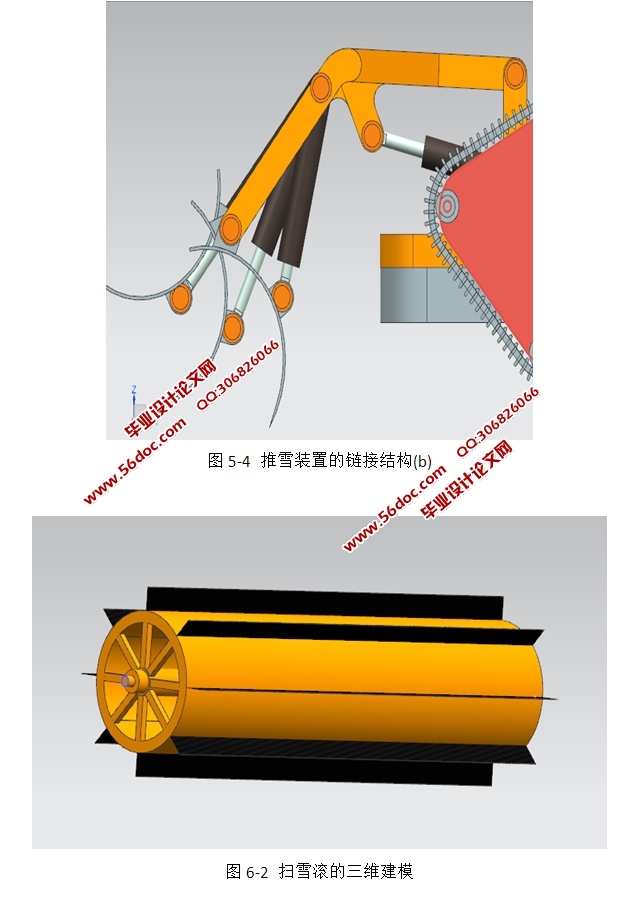
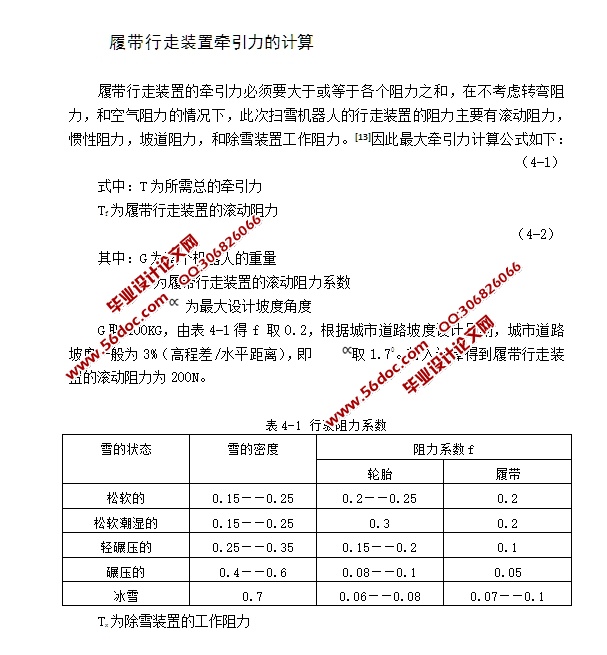
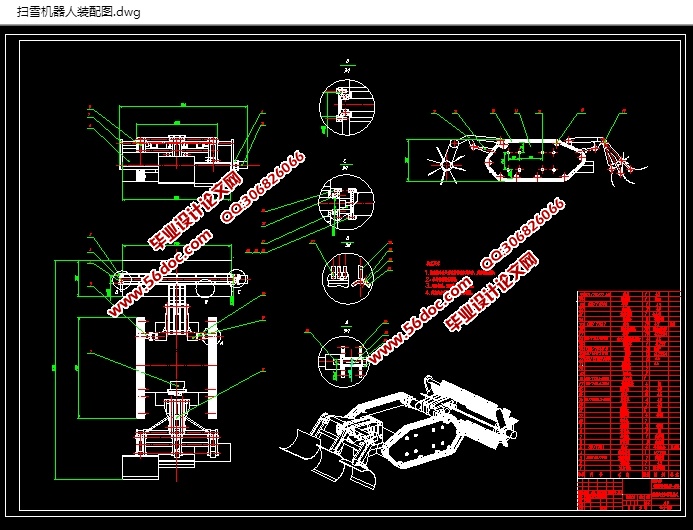
微型全自主扫雪机器人机械结构设计(含CAD图,UG三维图,仿真动画) 来源:wenku7.com 资料编号:WK715017 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK715017 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 微型全自主扫雪机器人机械结构设计(含CAD图,UG三维图,仿真动画)★(任务书,中期检查表,论文说明书19100字,CAD图3张,UG三维图,仿真动画,答辩问题) 摘 要 在我国北方大多数地区,冬天下雪量多,下雪时间比较长,尤其是新疆乌鲁木齐,长时间堆积的积雪的清除也成为城市正常运行的基础。大多数地区开始使用除雪机械来代替原始的人工扫雪。与原始的人工扫雪,除雪剂除雪相比机械式除雪具有更高的效率,更低的耗能,因此得到了广泛的应用和迅速的发展。 但是已有的大型扫雪机械设备不适用于如校园,小区等较窄的道路,并且目前的除雪机械中自主扫雪功能的实现还未成熟,因此设计出可自主实现导航避障功能的自主扫雪机器人也是非常有意义的,此次设计基于国内外已有的扫雪设备和方法研究出了一种适合较窄道路的可实时进行清扫工作的微型全自主扫雪机器人。 本论文主要是对其机械结构进行设计和创新,对其设计方案和工作原理进行分析,对其重要部分的零件进行计算和校核。最终用UG NX10.0 软件建立出扫雪机器人各个部件的三维模型,然后进行装配,行成运动仿真。在此次设计研究中,主要用到了以下几个关键技术:利用 UG NX10.0 软件建立了扫雪机零件的三维实体模型,进行装配后实现运动仿真,导出二维装配图。利用Auto CAD 2007 软件对导出的二维装配图进行修改达到国家标准图纸要求。 关键词 扫雪机;UG NX10.0;三维设计;设计计算 计方案 此次研究环境是雪地,经过综合考虑采用履带式行走机构,履带式行走机构对路面的要求较低,履带的防护性能比轮胎好,履带式还可增加车体重量,相应的提高牵引力。 (1)控制方式及动力形式:采用控制器控制,采用直流伺服电机提供动力,移动电源提供电力。 (2)组成结构方式:履带行走机构的各个部分采用独立的结构,用螺栓进行连接,可实现拆卸和便于调整。 (3)传动方式的选择:采用直流电动机直接与减速器相连接,相应的增大扭矩满足设计要求,减速器输出轴直接与驱动轮相连接,以这样的方式实现动力传递。 (4)转向设计:采用双侧履带双控方式,一个电动机控制一侧履带实现自主转向功能。 4.1.1 结构组成 履带式行走机构由机架、履带、电动机、减速器、控制器、驱动轮、导向轮、支重轮、托带轮和张紧装置等构成。[12]履带式行走机构的自重与铲雪装置和扫雪装置的重量所产生的载荷,通过支重轮和与其相啮合的履带传到地面上。产生履带行走机构向前运动的动力。 目 录 摘 要 II Abstract III 1 绪论 1 1.1 选题的意义 1 1.2 国内外的发展状况与趋向 1 1.2.1 国内发展状况 1 1.2.2 国外发展状况 2 1.2.3 发展趋势 3 1.3 扫雪途径及其应用范围 4 2 路面积雪性质的研究 5 2.1 积雪的物理性质 5 2.1.1 雪的密度 6 2.1.2 积雪的湿度 7 2.2 积雪的力学性能 7 2.2.1 积雪的硬度 7 2.2.2 积雪的摩擦系数 7 2.3 本章小结 8 3 微型全自主扫雪机器人机械结构设计 9 3.1 总体结构设计方案及其比较 9 3.2 微型全自主扫雪机器人的工作原理 9 3.2.1 基本结构 9 3.2.2 工作原理 9 3.3 本章小结 10 4 行走装置的设计计算和校核 11 4.1 设计方案 11 4.1.1 结构组成 11 4.1.2 工作原理及工作过程 12 4.2 履带行走装置动力方式的选择 12 4.2.1 履带行走装置牵引力的计算 12 4.2.2 履带行走装置原动机的选择 14 4.3 履带行走机构关键部件的设计及选择 16 4.3.1 履带的设计及选择 16 4.3.2 驱动轮的设计及选择 17 4.3.3 驱动轴的设计及计算校核 18 4.3.4 导向轮,拖带轮,支重轮的设计及选择 20 4.3.5 履带行走机构螺栓的选择与校核 22 4.4 本章小结 23 5 推雪装置的设计计算和校核 24 5.1 推雪板的设计 24 5.2 铲刃的设计 25 5.3 链接装置的设计 25 6 扫雪装置的设计计算和校核 27 6.1 扫雪装置的设计 27 6.2 扫雪装置的计算与校核 28 6.3 刷毛的选择 30 7 三维建模与装配及运动仿真 31 7.1 UG NX 10.0 功能介绍 31 7.2 UG NX 10.0 建模方法介绍 31 7.3 UG NX 10.0 用户 32 7.4 UG NX 10.0 装配建模 35 7.5 UG NX 10.0 运动仿真 36 参考文献 37 致谢 40