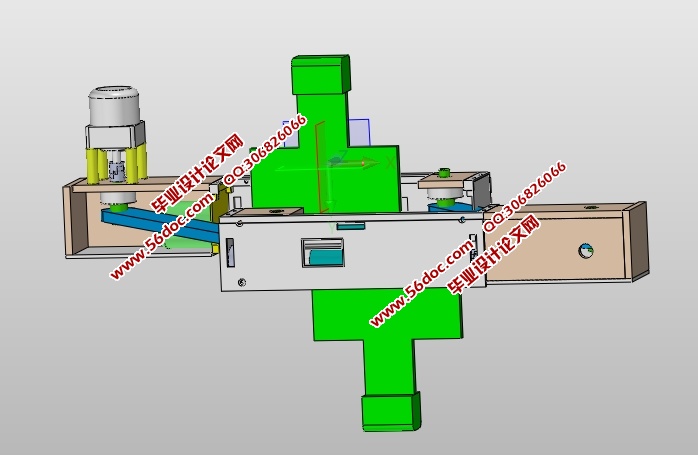
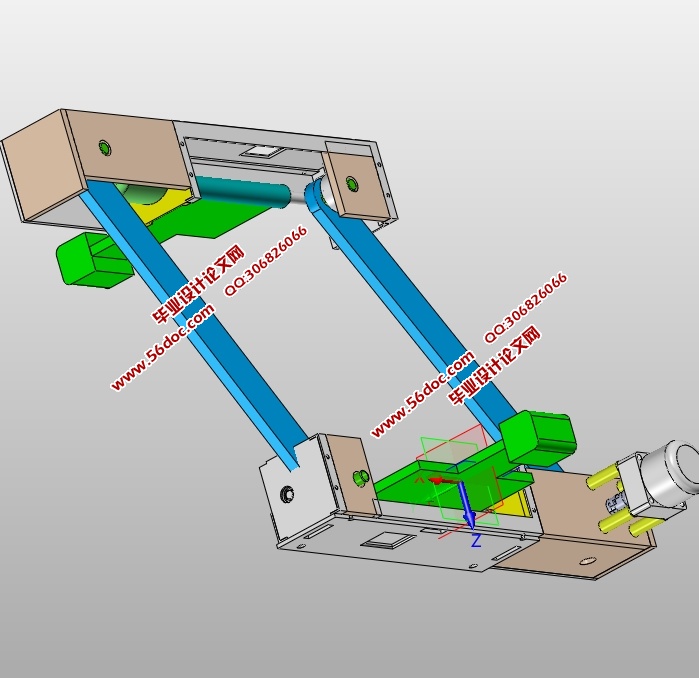
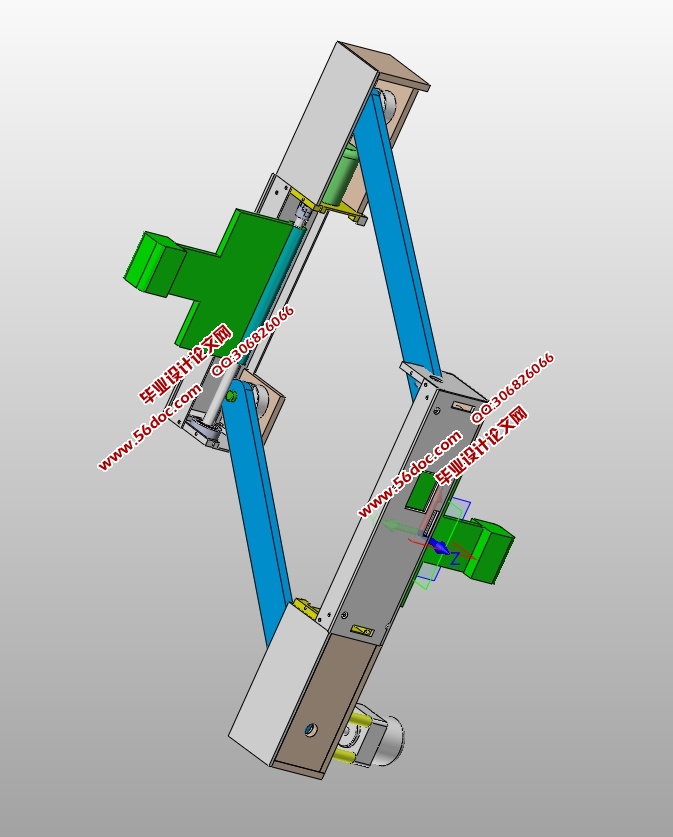
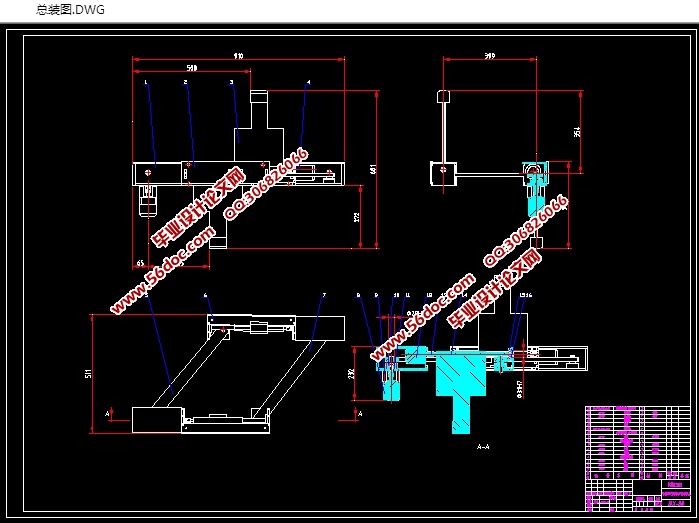
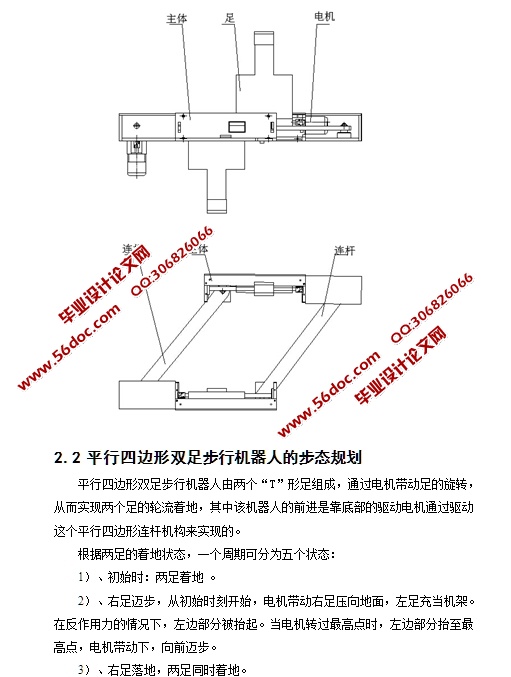
平行四边形双足步行机器人的设计与研究(含CAD图,SolidWorks三维 来源:wenku7.com 资料编号:WK714978 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK714978 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 平行四边形双足步行机器人的设计与研究(含CAD图,SolidWorks三维图)(开题报告,论文说明书17000字,CAD图纸9张,SolidWorks三维图) 本文运用大学所学的知识,提出了平行四边形双足步行机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了平行四边形双足步行机器人总的指导思想,从而得出了该平行四边形双足步行机器人的优点是高效,经济,并且变化灵活,多样,运行平稳的结论。 2 平行四边形双足步行机器人总体结构的设计 2.1 平行四边形双足步行机器人的总体方案图 本次设计的平行四边形双足步行机器人采取的方案是:采用碳钢板通过螺纹连接的方式来制作主体,通过主体里面的直流电机带动T型腿的摆动从而来实现机器人的步行功能,该机器人为双足,通过连杆机构分别将两条T型腿相连,通过控制系统的控制从而来实现机器人的步行功能,该机器人控制灵活,运行平稳。其具体方案布局图如下: 2.2 平行四边形双足步行机器人的步态规划 平行四边形双足步行机器人由两个“T”形足组成,通过电机带动足的旋转,从而实现两个足的轮流着地,其中该机器人的前进是靠底部的驱动电机通过驱动这个平行四边形连杆机构来实现的。 根据两足的着地状态,一个周期可分为五个状态: 1)、初始时:两足着地 。 2)、右足迈步,从初始时刻开始,电机带动右足压向地面,左足充当机架。在反作用力的情况下,左边部分被抬起。当电机转过最高点时,左边部分抬至最高点,电机带动下,向前迈步。 3)、右足落地,两足同时着地。 4)、左足迈步,和过程2一样。 5)、左足落地,回到状态。 3 机械传动的设计计算 3.1 电机的选型计算 已知整个平行四边形双足步行机器人的总重量150KG,其他重量50KG,我们取总重量为200Kg,移动速度为1~2r/min。 目 录 摘 要 i ABSTRACT ii 目 录 iii 1绪论 1 1.1 课题的来源与研究的目的和意义 1 1.2平行四边形双足步行机器人的发展现状 2 1.3 双足步行机器人的研究趋势 3 1.4 Solidworks设计基础 4 1.4.1 草图绘制 5 1.4.2 基准特征,参考几何体的创建 6 1.4.3 拉伸、旋转、扫描和放样特征建 7 1.4.4 工程图的设计 10 1.4.5 装配设计 11 2 平行四边形双足步行机器人总体结构的设计 12 2.1 平行四边形双足步行机器人的总体方案图 12 2.2 平行四边形双足步行机器人的步态规划 13 3 机械传动部分的设计计算 13 3.1电机的选型计算 13 3.2转动轴的设计计算 13 3.3轴承的选型计算 14 4 各主要零部件强度的校核 14 4.1转动轴强度的校核与计算 15 4.2轴承强度的校核计算 15 结 论 16 致 谢 17 参考文献 18 附录 一 32 附录 二 35