ШЋздЖЏеЊЙћЛњЕФДДаТЩшМЦ(КЌCADСуМўзАХфЭМ,SolidWorks,IGSШ§ЮЌЭМ)

1.ЮоашзЂВсЕЧТМ,жЇИЖКѓАДееЬсЪОВйзїМДПЩЛёШЁИУзЪСЯ.
2.зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
ШЋздЖЏеЊЙћЛњЕФДДаТЩшМЦ(КЌCADСуМўзАХфЭМ,SolidWorks,IGSШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ10800зж,CADЭМжН12еХ,SolidWorksШ§ЮЌЭМ,IGSШ§ЮЌЭМ) 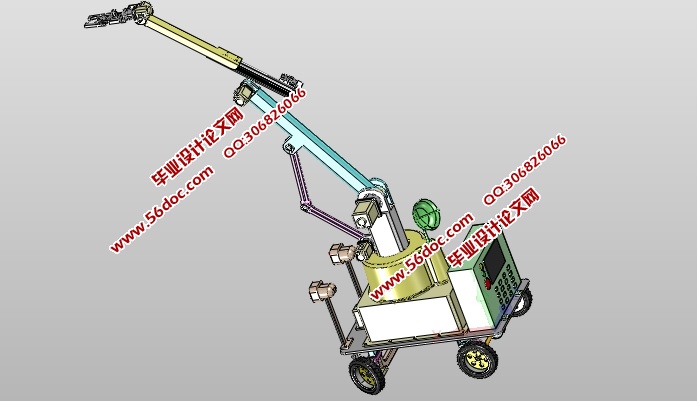 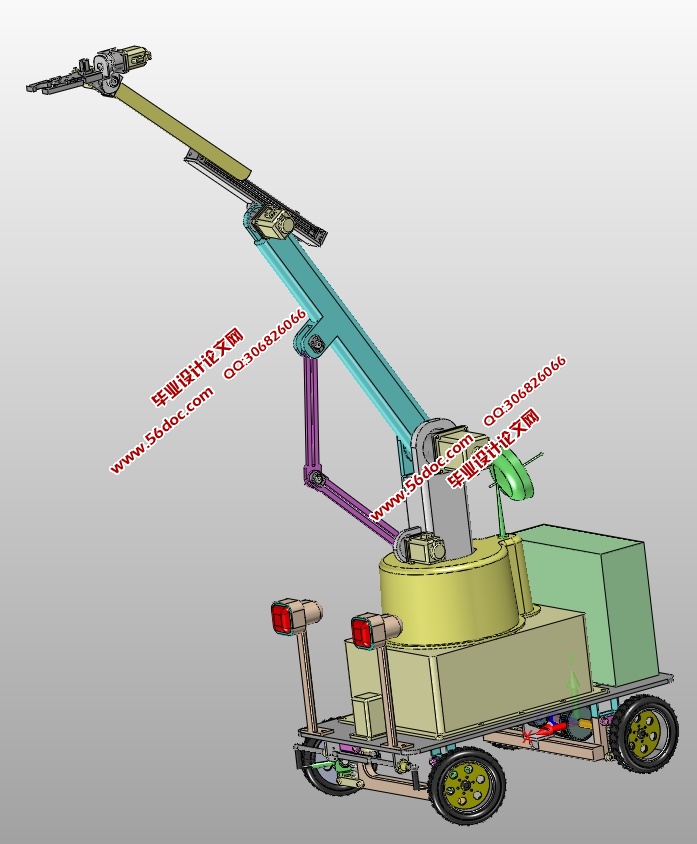 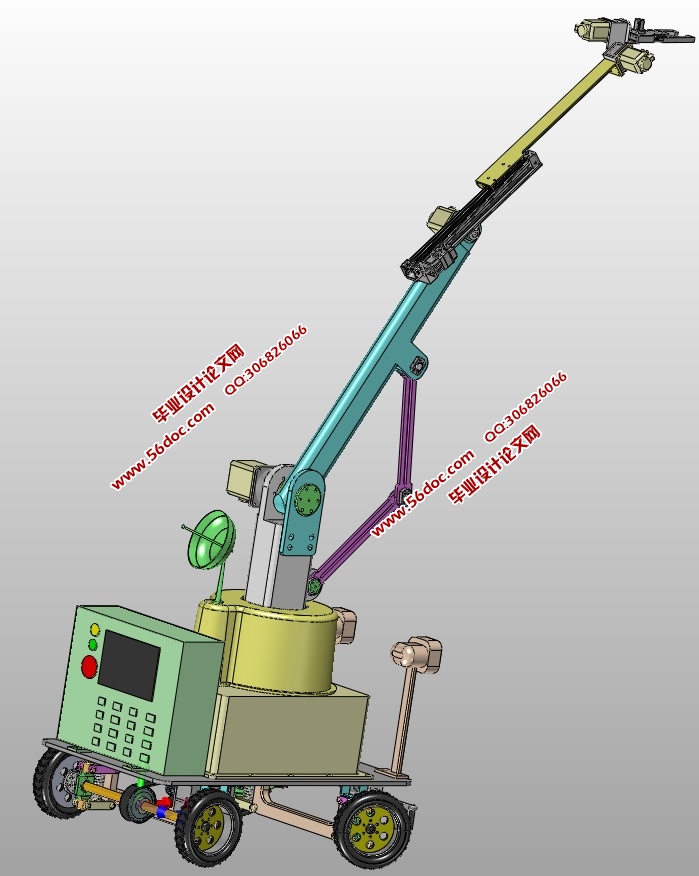 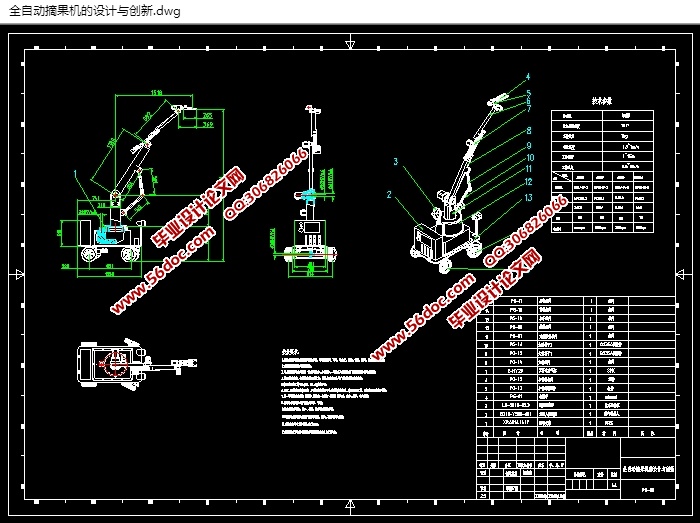   
|