微型装配机械手的结构设计(含CAD零件图装配图)(任务书,开题报告,外文翻译,论文说明书10000字,CAD图5张)
摘 要
到了越来越快的发展,其智能化程度越来越高,已经应用于工业生产制造、医疗和军事等各个领域,成为当前生产和高科技研究中的一个极其重要的构成部分。机器人上最为关键的执行部件就是机械臂,因此深入的研究机械臂有着非凡的现实意义。由于机械臂所对应的自由度不止一个,可用于在工业生产中完成各种工作。其能够替代人类从事各种重复、单调、繁重以及具备一定危险系数的作业,减轻工人的工作强度,提升工作效率和自动化水平。
本设计采用圆柱形坐标形式,机械手的旋转运动采用步进电机驱动,双作用气缸的运动增添辅助导向装置,增添了腰部所对应的导向性能以及刚性强度,腕部采用旋转型式的气缸以实现180°旋转运动。一端增加平衡装置使整体运动平稳。末端执行器的驱动型式采用形状记忆合金,其具备相对较轻的质量、相对较小的占地体积、单位质量具备较大的恢复力,且整体结构相对较为简单、控制方便易操作,无污染。论文按照手爪、手臂、腕部,底座进行设计。涉及气动技术、理论力学、机械原理以及相关零件的机械设计等。机械手能实现整体旋转,腰部、臂部伸缩,腕部旋转及摆动五个自由度,在导师的耐心详尽的指导下,通过查阅文献,书籍,经过努力最终完成。
关键词:装配机械手;工业领域;气缸
Abstract
With the rapid development of computer technology and automatic control technology,the development of robot technology is becoming faster and faster,and its intelligent level is becoming higher and higher. Robot has been used in industrial manufacturing, medical, military and other fields. It has become an integral part of modern manufacturing and high-tech research.As a main executive body of a robot , the study of robot arm has important meaning.With multiple degrees of freedom,robot arm can be used to make all kinds of work in industrial production.It can replace people engaged in all kinds of boring, repetitive, heavy or dangerous work, reduce labor intensity, improve production efficiency and automation level.
At one end of the design, the balancing device is added to make the whole movement stable. End actuator drive type using shape memory alloy (SMA), with its relatively light weight, relatively smaller accommodation volume, with greater resilience and overall structure is relatively simple, control convenient and easy operation and no pollution. According to the gripper arm, wrist, base design. Pneumatic technology, theoretical mechanics, mechanical principles and related parts of the mechanical design, etc.. Manipulator can achieve the overall rotation, waist, arm telescopic, wrist rotation and the swing of five degrees of freedom, under the guidance of the tutor's patience detailed, through the review of the literature, books, through the efforts finally completed.
Key word:Manipulator; industrial field,;cylinder
目 录
摘 要 III
Abstract IV
1 绪 论 1
1.1国外工业机器人的的发展 2
1.2国内机器人的发展 3
1.3存在问题分析及研究思路 4
1.4课题研究的意义 4
1.5本课题研究内容 5
2 微型装配机械手的总体设计方案 6
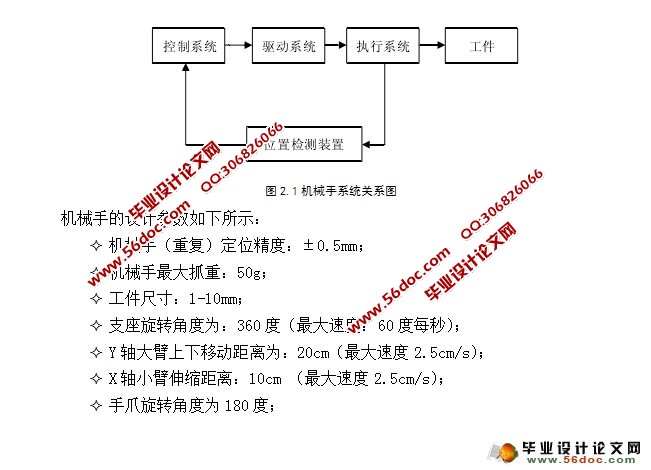
2.1 微型装配机械手的工作原理及系统组成 6
2.2 微型装配机械手基本形式的设计 8
2.3 驱动机构的设计 9
2.4 微型装配机械手详细设计参数 10
2.5 本章小结 10
3 微型装配机械手手部结构设计及计算 11
3.1 手部结构设计 11
3.1.1 端执行器的要求 11
3.2手爪的分类和设计 11
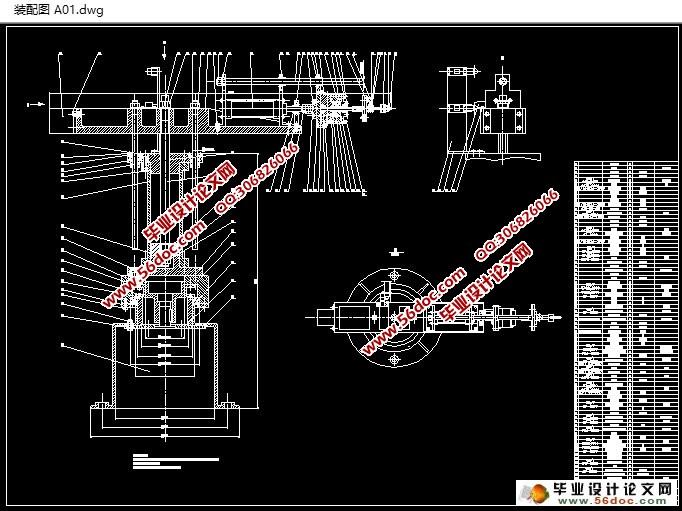
3.3微型装配机械手的结构设计 14
3.3.1微型装配机械手的结构 14
3.3.2形状记忆合金的驱动特性 14
3.4本章小结 15
4 微型装配机械手腕部的设计 16
4.1腕部设计的基本要求 16
4.2 腕部的结构设计 16
4.2.1 典型的腕部结构 16
4.2.2 腕部结构的设计 17
4.3 腕部的驱动力矩计算 17
4.4 腕部工作压力的计算 18
4.5 气压缸盖螺钉的计算 19
4.6 动片和输出轴间的连接螺钉 20
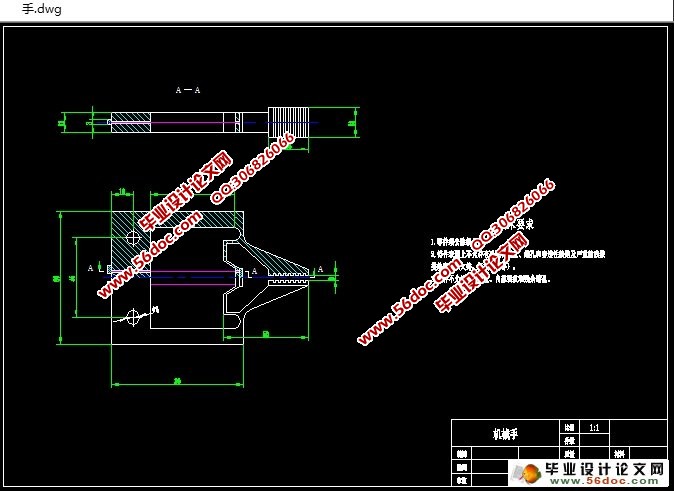
4.7摆动手臂结构设计 21
4.8本章小结 22
5 微型装配机械手手臂机构的设计 23
5.1 手臂的设计要求 23
5.2 伸缩气压缸的设计 23
5.2.1 气缸主要尺寸的确定 23
5.3 导向装置 27
5.4 本章小结 27
6 机械手腰部和基座结构设计及计算 28
6.1 结构设计 28
6.2 控制手臂上下移动的腰部气缸的设计 28
6.2.1双作用气缸结构 28
6.2.2 确定主要尺寸 29
6.2.3 气缸结构设计 32
6.3 导向装置 32
6.4 平衡装置 33
6.5 机身回转机构的计算 33
6.5.1电机的选型 34
6.6 本章小结 34
7 结论与展望 35
7.1结论 35
7.2展望 35
参考文献 36
致 谢 37
|