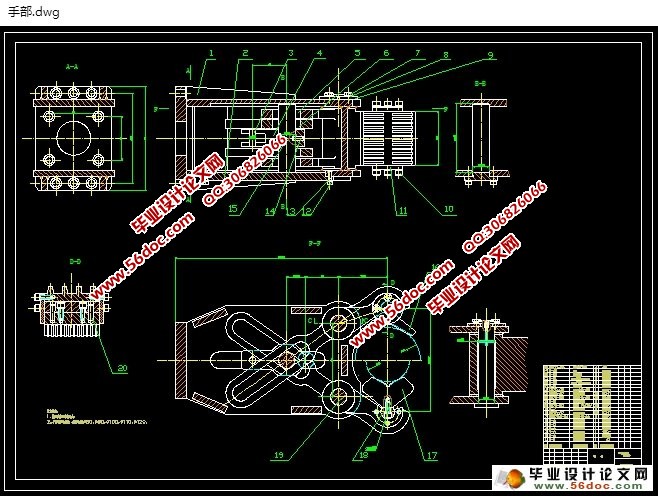
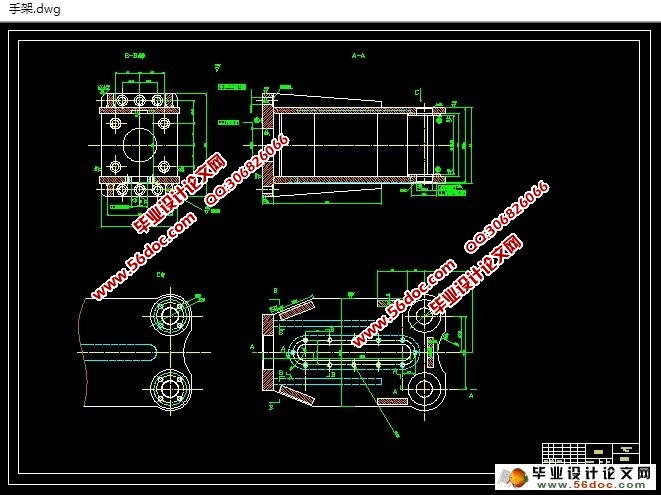
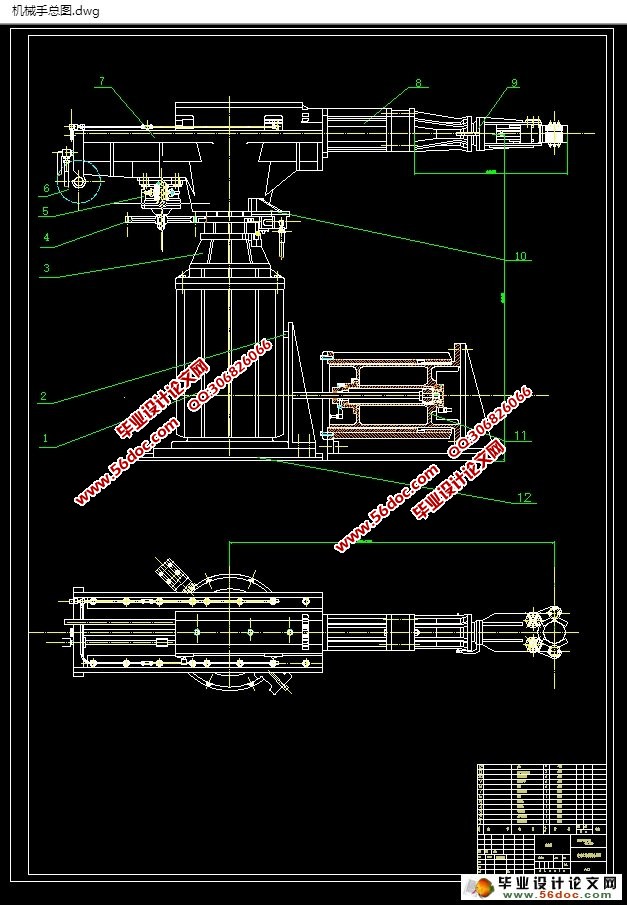
生产线车床上料机械手结构设计(含CAD零件装配图) 来源:wenku7.com 资料编号:WK713669 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK713669 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 生产线车床上料机械手结构设计(含CAD零件装配图)(任务书,设计说明书32000字,CAD图纸7张) 本文主要针对生产线上的自动化设计了一个模块工装下线机械手,实现模块下线的自动化。该机械手能实现机械手的伸缩、升降、夹紧和放松等动作。驱动系统采用气压驱动,实现了手臂的夹紧和放松动作。控制系统采用PLC控制,通过控制伺服电动机来实现机械手的上下、左右运动。机械手设手动和自动两种工作方式,可以通过转换开关进行工作方式转换。系统设有报警功能,当机械手出现故障时,能及时报警。 通过上述工作,机械手最终能够按照控制程序的要求进行运动,并且实现了上位机监控系统对本机械手的直观形象观测,达到了本论文的设计目的和要求。 用途:用于自动送料线,实现流水线自动装配。 1、爪重 10kg 2、自由度数 4个自由度 3、座标型式 圆柱座标 4、手臂最大中心高 1200mm 5、手臂运动参数 伸缩行程500mm 伸缩速度200mm/s 升降行程600mm 升降速度150mm/s 回转范围0°—180° 回转速度60°/s 6、手腕运动参数 回转范围0°—90° 回转速度45°/s 7、手指夹持范围 工料:Φ90-120mm 8、定位方式 行程开关或可调机械档等 9、定位精度 ±3mm 10、驱动方式 液压驱动 目 录 第1章 绪论 1 1.1 工业机械手概述 1 1.1.1 机械手的应用性 2 1.1.2 机械手先进性 2 1.1.3 国内外研究现状和趋势 3 1.2 设计目的 4 1.3 课题内容和设计要求 4 1.4 机械手系统工作原理及组成 6 第2章 机械手整体设计方案论述与证明 10 2.1 机械手的总体设计 10 2.1.1 机械手整体结构类型 10 2.1.2 坐标形式和机械手的自由度 11 2.1.3 设计具体采用方案 12 2.2 机械手腰座结构设计 13 2.2.1 机械手腰座结构设计要求 13 2.2.2 设计具体采用方案 14 2.3 机械手手臂结构的设计 15 2.3.1 机械手手臂设计要求 15 2.3.2 设计具体使用的程序 16 2.4 机械手腕部的结构设计 16 2.4.1 机器人手腕结构的设计要求 17 2.4.2 设计程序的具体运用 17 2.5 机械手末端执行器(手爪)的结构设计 18 2.5.1 机械手末端执行器的设计要求 18 2.5.2 机械手驱动模式 19 2.5.3 机器人夹持器的典型结构 19 2.5.4 设计具体使用的程序 20 2.6 机械手的机械传动机构的设计 21 2.6.1 工业机器人传动机构设计应注意的问题 21 2.6.2 工业机器人常用的传动机构形式 22 2.6.3 设计具体采用方案 25 2.7 机械手驱动系统的设计 25 2.7.1 机器人各类驱动系统的特点 25 2.7.2 工业机器人驱动系统的选择原则 26 2.7.3 机器人液压驱动系统 26 2.7.4 机器人气动驱动系统 28 2.7.5 机器人电动驱动系统 29 2.7.6 设计具体使用的程序 32 2.8 机器人手臂的平衡机构设计 32 2.8.1 机器人平衡机制的形成 32 2.8.2 设计具体方案 33 2.9 机械手的主要技术参数 33 第3章 机械手设计计算 35 3.1 夹持式手抓的设计计算 35 3.1.1 手抓部力的计算 35 3.1.2 手部加紧油缸的确定 36 3.2 腕部设计 36 3.2.1 腕部的设计要求 37 3.2.2 腕部的结构 38 3.3 臂部设计 41 3.3.1 臂部设计要求 42 3.3.2 臂部结构 46 3.3.3 臂部伸缩运动结构 47 3.3.4 臂部伸缩油缸的计算 48 3.3.5 臂部回转运动 50 3.3.6 臂部升降运动 51 3.3.7 臂部升降油缸的计算 52 第4章 机械手的其他部分装置 55 4.1 缓冲定位装置 56 第5章 机械手总体方案总结 57 5.1 传动方案的确定 57 5.2 规格参数 57 5.3 结构特点 58 参考文献 60 致谢 61