组装生产线机械手夹持器的设计(含CAD零件装配图)(论文说明书7400字,CAD图纸11张)
The design of mec hanical hand gripper
摘要
针对国内组装生产线机械手夹持器的功能和适应性相对于国外的机械手夹持器不足的现状,来设计机械手夹持器来提高效率,解放人力。
国内机械手夹持器的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。近期对机械行业中机械手设备的使用情况进行了调查,发现在机械行业中,机械手是提高大型生产线组装效率和实现自动化程度的最重要的设备之一,通过在组装生产线使用机械手,可以在很大程度上面减少人工的投入和有效地增加组装效率和节省人力的投入。自然而然机械手配备的夹持器的设计加工也非常重要。在组装时如果使用临时的组装设备,不但劳动强度太大而且工作效率极低,所以设计一个专用的机械手夹持器势在必行。
通过大学所学的知识,提出了机械手夹持器的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了机械手夹持器总的指导思想,从而得出了该机械手夹持器的优点是工作灵活,运行平稳。
关键词:组装生产线;机械手夹持器;结构;平稳
Abstract
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools.
It can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading.
in the prescribed procedure work.Small twisted paper broken machine for ordinary home, not only can be used for minced meat, can also be used with crushed peanuts, crushed ice, spices and other food, small power requirements, powered by the motor drive, reasonable structure design, can meet the family kitchen generally meat food consisting mainly of minced required.
Key words:sturcermonickouey;the machine cylinder;pneumatic loop;degrees
1.3机械手的组成和分类
机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
2 机械手夹持器结构的设计
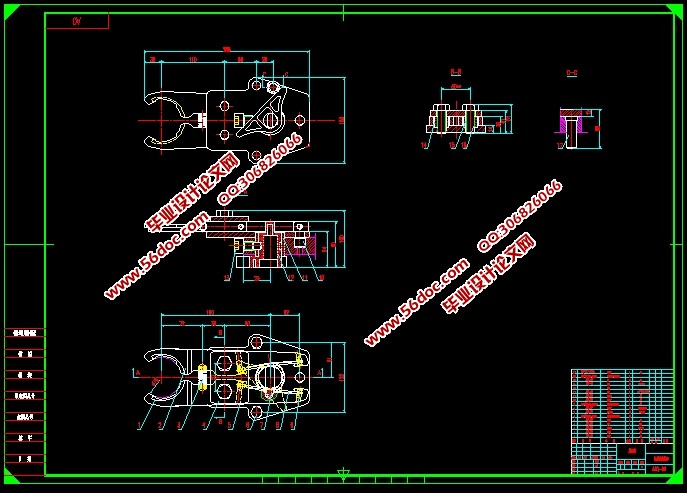
2.1 机械手夹持器的总体方案图
本次设计的题目是机械手夹持器的设计,该机械手夹持器采用压缩弹簧的张力实现该机械手夹持器的张开,气缸提供驱动机械手夹爪开合的动力。该机械手夹持器具体的总体方案图如下图所示:
2.2 机械手夹持器的工作原理
该机械手夹持器采用压缩弹簧的张力实现该机械手夹持器的张开,旋转气缸提供驱动机械手夹爪开合的动力,当需要夹紧工件时,只需要通过直流电机的旋转就能够使该机械手的夹爪夹紧,然后当需要松开工件的时候,需要电机反转就可以使夹爪松开工件,然后移载工件到指定的位置。

目 录
摘要 I
Abstract II
1 绪论 1
1.1本课题研究的内容 1
1.2 国内外发展状况 2
1.3机械手的组成和分类 5
2 机械手夹持器结构的设计 11
2.1 机械手夹持器的总体方案图 12
2.2 机械手夹持器的工作原理 13
2.3 装配机械手的功能特点 14
2.4 机械部分的设计计算 16
2.4.1电机在选型设计 17
2.4.2压缩弹簧的选型计算 19
2.4.3螺栓的选型计算 22
3 机械手夹持器中关键零部件的强度计算与校核 24
3.1 弹簧的强度计算与校核 25
3.2 套筒的强度计算与校核 27
结论 28
致谢 29
参考文献 30
|
