焊接机械手的结构设计(含CAD零件图装配图)(开题报告,中期报告,外文翻译,论文说明书18200字,CAD图9张)
摘 要
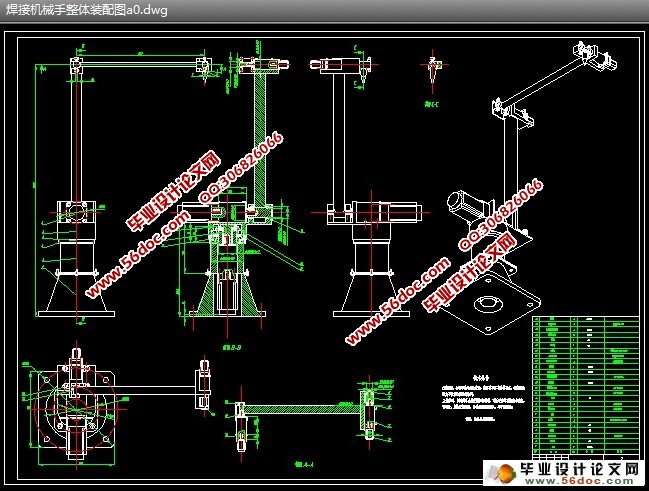
本设计为焊接机械手的结构设计,主要研究内容:腰部回转机构的设计;大、小臂和腕部回转的结构设计。
本设计由整体布局入手,参考现有关节型机械臂的相关设计,初步确定腰部的转动惯量,从而确定电机的选型,安装等相关设计。在机械臂的灵活和精度的前提下完成总体结构的设计,然后根据总体结构,从而确定本设计的机械臂各个主要零部件的设计。
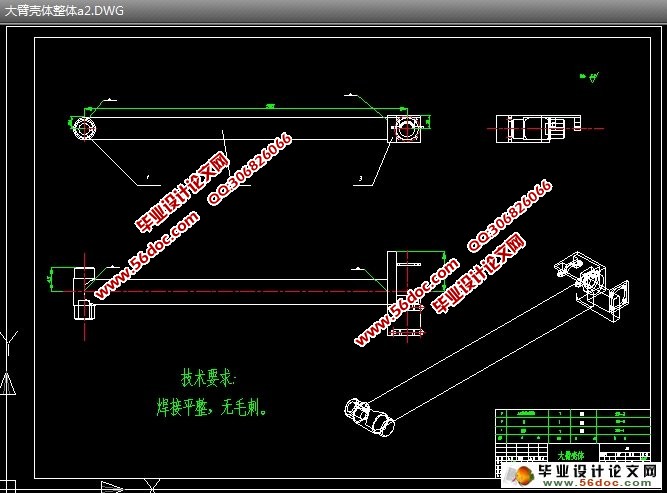
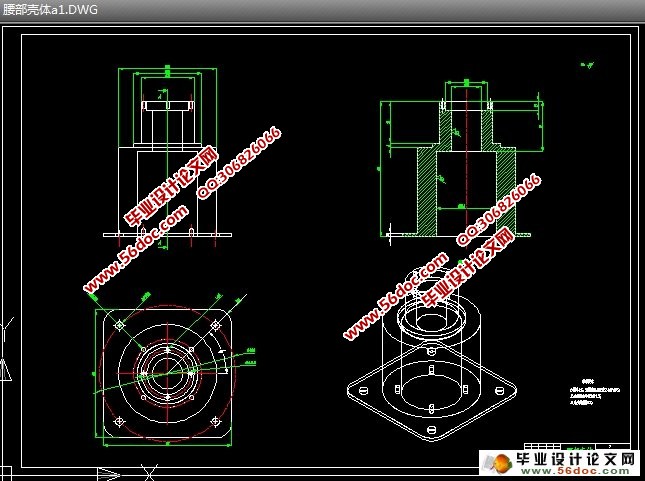
在主要零部件的设计中,主要包括腰部壳体的设计、轴的结构设计、轴承的选择、电机的设计计算、大小臂的结构和固定等。
本设计整体在现有关节型机械臂的结构上做了修改,使得它能够更好的满足本设计的设计要求。本设计结构简单、重量轻、外形尺寸小、设备费用低、运转安全、操作方便、便于维修和管理。
关键词:机械手;谐波减速器;结构设计
Structure design of robot arm
Abstract
The design for the design of welding structure of the manipulator, the main research contents: the design of the waist turning mechanism; structure design of large, small arm and wrist rotation.
This design by the overall layout with reference to the relevant design, the existing joint type manipulator, preliminary determine the moment of inertia of the waist, so as to determine the motor selection, installation and other related design. Complete the design of the overall structure of the flexible manipulator based on precision and the next, and then based on the overall structure, design of mechanical arm to determine the design of all the major components of the.
The design of the main components, including the housing design, structural design of shaft, bearing selection, design and calculation of the size of motor, arm structure and fixed.
The design of the whole made changes in the existing joint type manipulator structure, so that it can better meet the design requirement of this design. The design has simple structure, light weight, small size, low cost of equipment, operation safety, convenient operation, easy to repair and management.
KeyWords:robot arm;harmonic drive;structure design
本题目规格参数:
腰部回转最大角度280度;
摆动最大角度120度;
工作范围范围0-450mm;
本机械手的主要动作是:
首先腰部回转机械臂和焊点处于同一平面;接着大臂回转,调整焊枪和焊点的距离;然后小臂回转,使焊枪接触焊点;最后腕部回转,使焊枪和焊点垂直,达到焊接的目的。

目 录
1 绪论 1
1.1 机器人简介 1
1.1.1 机器人的发展及应用 2
1.1.2 点焊机器人介绍及其研究意义 4
1.1.3 机器人的组成 6
1.2 机械手的组成 8
1.3 本文主要研究工作 11
2 机械手的总体结构 12
2.1 机械手总体结构的类型 12
2.2 设计具体采用方案 13
3 机械手腰部机座 15
3.1 机械手腰部机座结构的设计 15
3.2 机械手腰部机座设计的具体采用方案 15
3.3 电动机的选择 16
3.4 减速器的选择 17
3.5 键的选择 18
4 机械手手臂的结构设计 20
4.1 设计具体采用方案 21
4.2 大臂电动机的选择 21
4.3 大臂减速器的相关计算 22
4.4 小臂电动机的选择 23
4.5 小臂减速器的相关计算 24
5 机械手腕部的结构方案设计 27
5.1 腕部电动机的选择 27
5.2 腕部减速器的选择 27
6 轴承的选用与校核 29
7 结论 39
参考文献 40
致谢 41
|
