冲床上料机械手设计(含cad零件图和装配图)(开题报告,中期报告,外文翻译,论文说明书18700字,CAD图19张)
摘 要
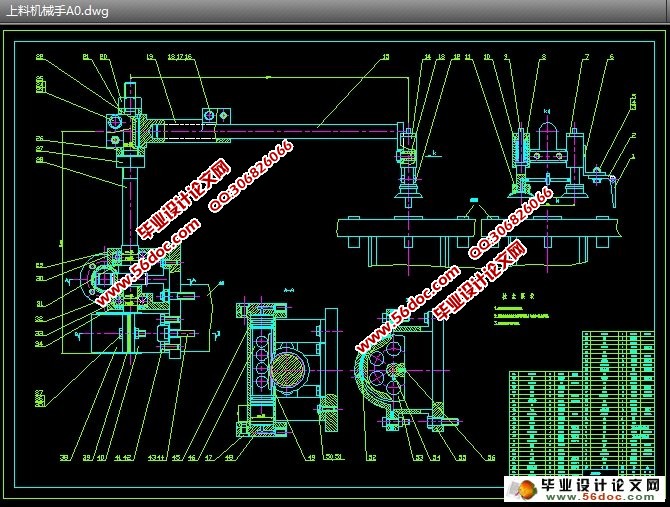
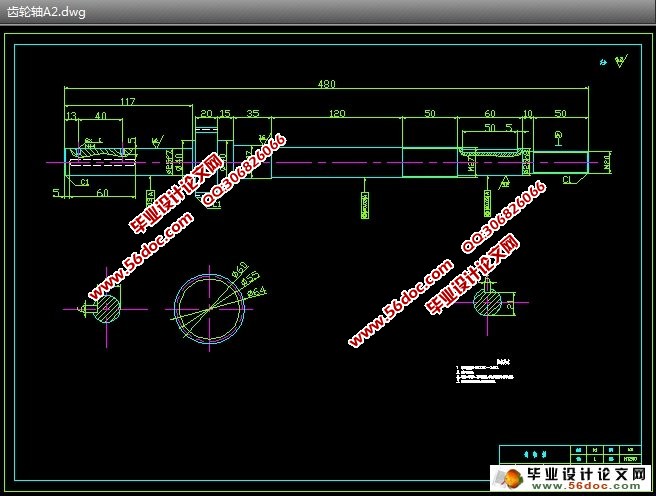
机械手是模仿着人手的部分动作,按给定程序、轨迹实现自动抓取、搬运和操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。本次设计的60吨冲床上料机械手根据规定的动作顺序,完成对机械手的设计,对机械手的工作原理,结构使用范围,特点参数选择等方面进行了阐述。此60吨冲床上料机械手主要是给冲床进行上料和从储料框中取料;机械手的抓重1Kg;1个自由度三个具体动作,自由度为腰座的转动,采用圆柱坐标;其余两个动作为机械手的升降和伸缩,采用螺母和螺栓调节,可根据生产的需要改变机械手手臂的高度和长度以及更换吸盘。回转角度:60度;送料频率:50-60次/分;驱动方式为气压传动;机械手的腰座回转采用气缸带动齿条齿轮驱动;本设计主要对手部进行了设计和计算,腰座回转采用回转气缸。
关键词:上料机械手;冲床上料;气压传动
Design for the punch manipulator
Abstract
Manipulator is imitate the part of the hand, according to the given program, track and for automatic mechanical device to realize the acquirement, handling and operation of the. The manipulator used in the industrial production is called "industrial manipulator". 60 tons punch the design of the manipulator according to the provisions of the action sequence, complete the design of manipulator, the working principle of the manipulator, the use range structure, gives the characteristic parameters. This 60 tons punch manipulator is mainly to press for feeding and from the material storage box material; mechanical hand catch weight 1Kg; 1 degrees of freedom three specific actions, degrees of freedom for rotation waist seat, using cylindrical coordinates; the remaining two of the mechanical hand movements and the expansion, the nut and bolt adjustment, according to production needs to change the mechanical arm height and length and replacing chuck. Because the rotary angle: 60 degrees; the feeding frequency: 50-60 times / points; drive mode for pneumatic drive; waist seat rotary manipulator cylinder is used to drive a rack gear drive; the design of the main part of the design and calculation, waist, rotating the rotary cylinder.
KeyWords:feeding manipulator;punch feeding;pneumatic transmission
本题目规格参数:
1. 抓重: 约1公斤
2. 自由度数: 1个
3.手臂运动参数:
手臂回转角度:600
手臂送料频率:50~60次/分
4.驱动方式: 气压
目 录
1 绪论 1
1.1 机械手简介 1
1.2 机械手发展现状及应用 1
1.2.1国内外发展现状 1
1.2.2机械手的应用 4
2 机械手的总体设计 7
2.1 机械手的总体结构 7
2.1.1 机械手组成 7
2.1.2 机械手坐标形式的确定 9
2.1.3上料机械手的组成及工作原理 9
2.2 机械手腰座结构的设计 11
2.1.1 机械手的驱动系统的确定 12
2.1.2 机械手的机械传动机构的确定 15
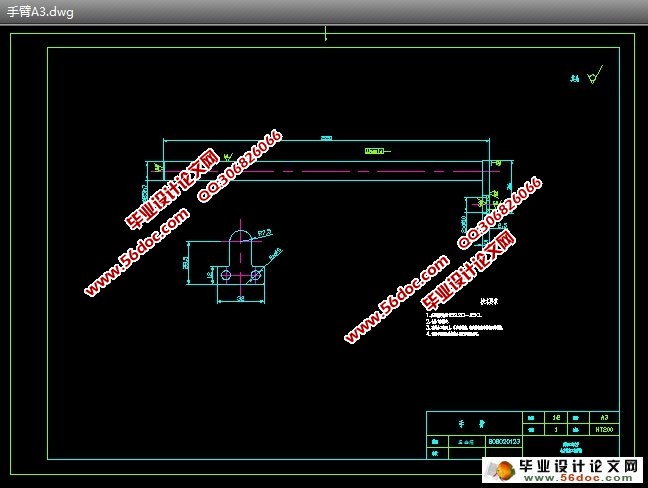
2.3 机械手手臂的结构设计 18
2.4 机械手手部的结构设计 19
3 机械手理论分析和设计计算 21
3.1 系统设计计算 21
3.1.1 确定气压系统基本方案 21
3.1.2 气压缸的总机械载荷的计算 22
3.1.3 气缸强度的计算及校核 23
3.1.4 计算和选择气缸元件 25
3.2 吸盘的选择和计算 25
总 结 29
参考文献 30
致 谢 31
|
