四履带搜救机器人的结构设计—移动平台设计(CAXA)★(开题报告,中期检查表,外文翻译,实习报告,论文设计说明书21400字,CAXA图5张)
摘 要
分析了国内外履带式机器人的研究现状,讨论了履带式机器人在机械结构、稳定性和控制方法等方面的现有研究方法,列举了履带式机器人研究中存在的问题,展望了履带式机器人的发展方向。
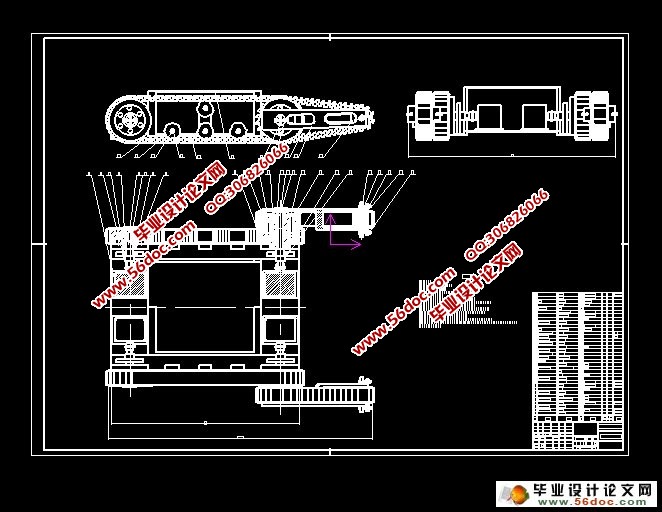
在观察分析其他机器人的结构及经验的基础上,进行方案比较选定的设计,是一种履带式搜救机器人的移动平台,设计内容包括设计行走底盘、摆臂和移动平台的减速器,并对机器人的局部受力情况作了具体的分析。
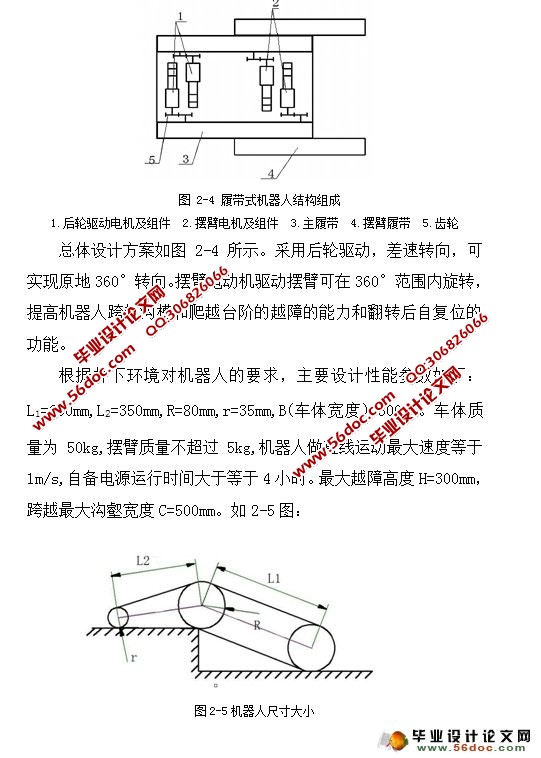
为发挥四履带双摆臂机器人的最佳越障性能,本文从运动学的角度,在固定双履带机器人越障机理的基础上,分析了四履带双摆臂机器人克服台阶、斜坡、沟道等典型障碍的运动机理及其最大越障能力,重点研究了四履带双摆臂机器人正向和反向两种攀越台阶方式的运动机理及其最大越障能力。本文推导出机器人的最佳越障性能及对应的质心和摆臂的位置,可为机器人越障时质心位置的控制提供理论依据.
本设计的重点在于机器人的移动平台结构设计,由于机器人整体的设计难度较大,材料和机构精度要求较高,本设计为此类设计提供了较成熟的设计方案。
关键字:机器人;质心;越障;攀越台阶;履带底盘;
Abstract
What this design was a section of marching fire robot foundation level carrier, the design content walks the chassis including the design and swing arm and the retarder as well as has made the concrete analysis to robot's partial stress situation. Trial manufacturing overall robot structure. In the design trial manufacturing process, the unceasing observation analyzes other robot's structure, absorbs the predecessor to experience, carries on the plan quite to designate. And goes down to the factory to process one to carry on the study, brings to completion the processing technique of manufacture, avoids stepping onto only pauses the written design to be separated from the actual manufacture the tortuous path.
The current status domestic and overseas with respect to tracked mobile robots was surveyed, and the existing research approaches in terms of theme chinacal structure, stability and control algorithms of tracked mobile robots were described. To conclude, the problems to be solved were stated and the future development of tracked mobile robots was discussed.
For performing the best obstacle-surmounting capability of four-track robot with two swing arms, obstaclesur mounting mechanism of the four-track robot with two swing arms and its capabilities of surmounting obstacles, including step and slope-climbing, and channel-crossing, are analyzed from the viewpoint of kinematics based on the obstaclesur mounting mechanism of the fixed two-track robot. Its motion mechanism and maximal obstacle-surmounting capability of step-climbing forward and backward are mainly analyzed. The theoretical value of maximal obstacle-surmounting capabilities of the prototype are obtained and compared with the test results. And the best obstaclesur mounting performance and the corresponding centroid and swing arm positions are deduced. This paper would provide theoretical basis for centroid position control in obstacle-surmounting process.
This graduation project's key point lies in robot's trial manufacturing research work, because the robot whole's design difficulty is big, the material and the organization accuracy requirement is high, this trial manufacturing product has not been able to take the mature product to carry on adds the manufacture, can only do for the guidance prototype supplies the reference.
Key words: Robot; centroid; obstacle-surmounting; step-climbing; Caterpillar band chassis

目录
1 绪论 1
1.1 引言 1
1.2 课题研究的背景及意义 2
1.2.1 课题研究的背景 2
1.2.2 课题研究的意义 2
1.3 机器人的研究现状 3
1.3.1 国外研究现状 3
1.3.2 国内研究现状 5
1.3.3 搜救机器人的发展趋势 7
2 搜救机器人移动平台结构分析 16
2.1 搜救机器人的设计要求 16
2.2 典型移动机构方案分析 18
2.2.1 轮式移动机构特点 18
2.2.2 腿式移动机构特点 19
2.2.3 履带式移动机构特点 20
2.2.4 履、腿式移动机构特点 21
2.2.5 轮、履、腿式移动机构性能比较 22
2.3 本研究采用的行走机构 22
2.4 搜救机器人的移动平台结构和摆臂结构 23
2.4.1 移动平台结构 23
2.4.2 摆臂结构 24
2.5 越障分析 25
2.5.1 机器人跨越台阶 26
2.5.2 跨越沟槽 27
2.5.3 斜坡运动分析 28
3 机器人驱动电机电机设计 30
3.1 基于平地的最大速度的电机功率计算 30
3.2 爬坡最大坡度的驱动电机功率计算 31
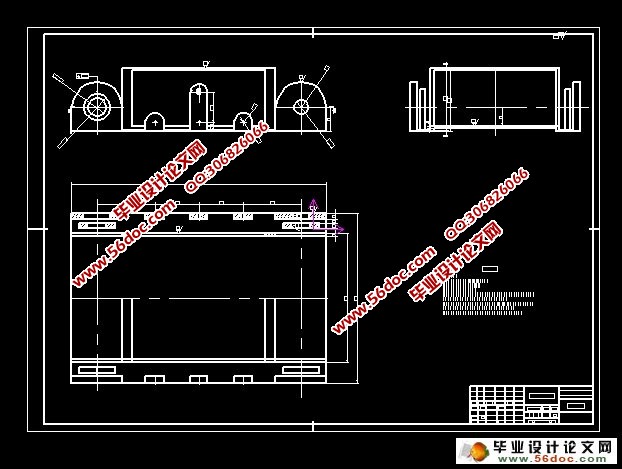
4 移动平台的减速器相关设计 33
4.1 移动平台的减速器方案分析 33
4.1.1 移动平台的减速器应满足的要求 33
4.1.2 移动平台的减速器方案分析 33
4.2 移动平台的减速器的设计计算 35
4.2.1 移动平台的减速器的传动方案分析 35
4.2.2 配齿计算 35
4.2.3 初步计算齿轮的主要参数 36
4.2.4 装配条件的计算 37
4.2.5 齿轮和轴强度的验算 37
5 移动机构履带设计 39
5.1履带的选择 39
5.2 确定带的型号和节距 40
5.3确定主从动轮数据 41
5.3.1 驱动轮参数计算 42
5.3.2 从动轮参数设计 43
6 传动轴的设计 44
6.1 驱动轴的设计 44
6.2 驱动轴的强度校核 46
7 摆臂设计 49
7.1 摆臂作用 49
7.2 翼板部分设计 49
7.3 摆臂齿轮计算 51
7.4 摆臂轮轴的设计 52
7.5 摆臂减速器相关参数 53
全文总结 54
致 谢 56
参考文献 57
|
