基于PLC机械手控制系统的设计(附CAD图)
来源:wenku7.com 资料编号:WK718583 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK718583
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于PLC机械手控制系统的设计(附CAD图)(任务书,开题报告,外文翻译,论文说明书11000字,CAD图4张)
摘要
随着工业化程度不断提高,同时响应“中国制造2025”的号召,机械手在工业生产中扮演着举足轻重的角色,已成为工业生产中不可或缺的一部分。
本问研究通过PLC控制和Wincc监控来实现机械手的控制,通过PLC软件的编程来实现对机械手的运动控制,通过Wincc组态监控画面来实现对机械手运动情况的了解。
本文侧重于对PLC软件程序的设计以及上位机组态监控的设计。对于软件控制流程的设计以及控制程序的编写,使得机械手能够按照自动和手动两种方式运动。其中自动操作程序分为单周期操作和连续操作。对于上位机组态监控的设计,从变量的导入到监控画面的设计,使得机械手的运动能够清晰展现在计算机的屏幕上。
通过上述的操作,机械手能够按照程序设计的,完成对工件的一系类动作,并实现Wincc对本机械手清晰直观的监控,达到论文的设计要求和目的。
关键词:PLC Wincc 机械手
Design of Control System Based on PLC Robot
Abstract
With the continuous increase in industrialization, and in response to the call of the National Industry 4.0, the manipulator plays a pivotal role in industrial production and has become an integral part of industrial production.
This system realizes the manipulator's control through PLC control and Wincc monitoring. It realizes the manipulator's motion control through the PLC software's programming. Through the Wincc configuration monitoring picture, it realizes the understanding of the manipulator's movement situation.
This thesis focuses on the design of the PLC software program and the configuration monitoring of the host computer. For the design of the software control process and the preparation of the control program, the robot can move in both automatic and manual modes. The automatic operation program is divided into single-cycle operation and continuous operation .For the upper computer configuration monitoring design, from the introduction of variables to the design of the monitoring screen, the robot's movement can be clearly displayed on the computer screen.
Through the above operations, the robot can complete a series of actions on the workpiece according to the program design, and realize Wincc's clear and intuitive monitoring of the robot to achieve the design requirements and objectives of the paper.
Keywords: PLC; Wincc;manipulator

目录
摘要 1
Abstract 1
第一章 绪论 4
1.1课题研究背景 4
1.2国内外机械手控制系统的发展和现状 4
1.2.1国外研究现状 4
1.2.2国内研究现状 4
1.3机械手研究的目的和意义 4
1.4论文的主要内容 5
第二章 控制系统硬件电路设计 6
2.1 PLC的选型 6
2.2 硬件系统结构 6
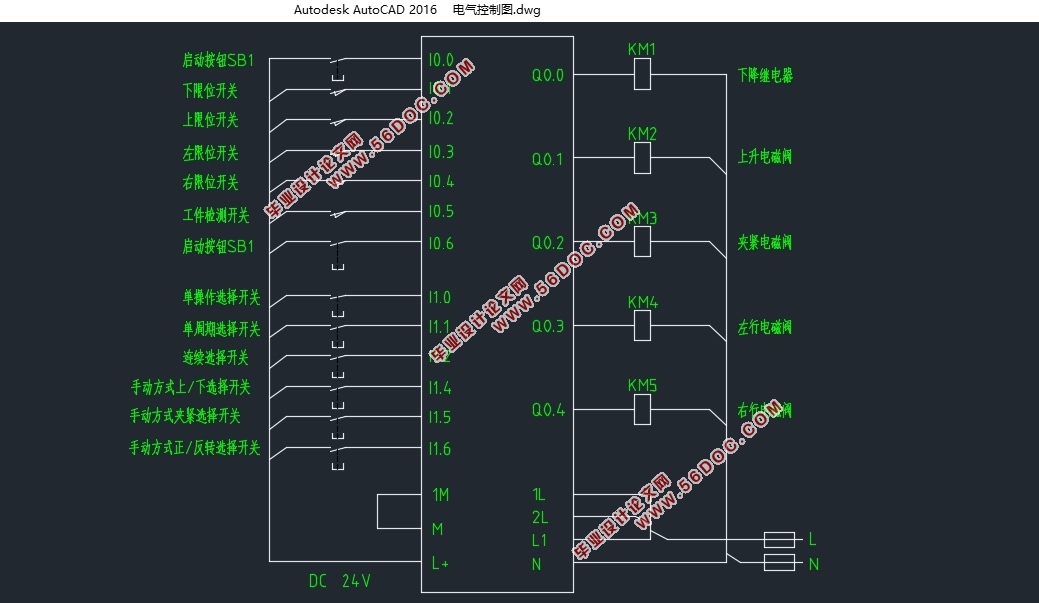
2.3 控制电路设计 8
2.4成本分析 9
2.5本章小结 10
第三章 可编程控制器设计 11
3.1可编程控制器概述 11
3.1.1 PLC的主要特点 11
3.1.2 PLC的硬件组成 12
3.2 PLC输入输出设计 13
3.3 PLC程序设计 14
3.3.1主程序设计 14
3.3.2手动操作程序设计 15
3.3.3自动操作程序设计 17
3.3.4旋转控制程序设计 24
3.4 系统运行结果 32
3.5本章小结 33
第四章 组态监控系统设计 34
4.1系统组态软件的选择 34
4.2 Wincc监控系统的设计 34
4.3 监控系统的调试 37
4.3本章小结 40
第五章 总结与展望 42
参考文献 43
致谢 44
|
