平移式机械手的控制设计(西门子S7-200)(含CAD图)(论文说明书11000字,CAD图11张)
摘 要
机械手是我国的工业自动化产品,它遍及工业生产、物流等多种领域。而可编程序控制器就是人们来对工业自动化设备进行编程和操控的一类工业控制装置[3]。传统的控制系统是采用继电器—接触器的方式,具有逻辑控制、顺序控制、定时、计时等功能[1],而可编程序控制器都能实现且更具优势。
本论文介绍了PLC技术在平移式机械手控制系统中的应用,设计了一套比较可行的控制系统方案其中包括系统设计的思路、平移式机械手的控制要求以及硬件构造。[8]本次通过控制要求确定了PLC的输入输出端口,从而决定选用西门子S7-200系列的CPU226,程序控制各类电磁阀及气压缸等实现了对金属物块在空间上的搬运工作,并绘制了反映平移式机械手工作的系统原理图、 以及每个功能模块程序设计、控制系统当中的液压驱动图及 ,最后通过编写PLC程序控制各类电磁阀及液压缸来达成机械手的控制要求。本课题设计的机械手可在空间上实现对物品的运送, 可替代人在危险环境下的工作,具有实用价值[2]。
Design of control system of rotary machinery
Abstract
The manipulator are our product in industrial automation, which is widely used in industrial production and other fields. The programmable controller is that people used to carry out a new industrial automation equipment, programming controlled by the control device[3]. Traditional control system is the use of relay - contact manner, with logic control, sequential control, timing, timing and other functions [1], and programmable logic controller and can achieve an advantage.
This paper introduces the PLC technology control system we designed a set of feasible control system solutions.[8]The control requirements determined by the PLC’s I/O input and output ports,and thue decided to use Siemens S7-200 series CPU226,program control various types of solenoid valves and pneumatic cylinder or the like to achieve the handling of metal work pieces in space, and draw the rotary robot control system schematics, system among the pneumatic system diagram and PLC hardware wiring diagram and the control flow chart control, and finally to achieve control requirements robot by writing PLC program control various types of solenoid valves and pneumatic cylinders. This paper intends to design a robot to achieve material handling in space, the action is relatively flexible, can replace manual work in a hazardous environment, it has a certain practical value[2] .
Keywords: rotary manipulator, programmable controllers, control systems, Siemens, design
目 录
摘 要 I
第一章 绪论 1
1.1 引言 1
1.2 机械手简述 2
1.2.1机械手的定义 2
1.2.2机械手的应用 3
1.2.3机械手的研究意义及发展 3
1.3 PLC简述 4
1.3.1PLC的定义 4
1.3.2PLC的应用 5
1.3.3PLC的工作原理 6
第二章 控制系统的设计方案 7
2.1 系统设计的基本思路 7
2.2 平移式机械手的控制要求 7
2.3 机械手硬件构造 8
第三章 控制系统的硬件设计 11
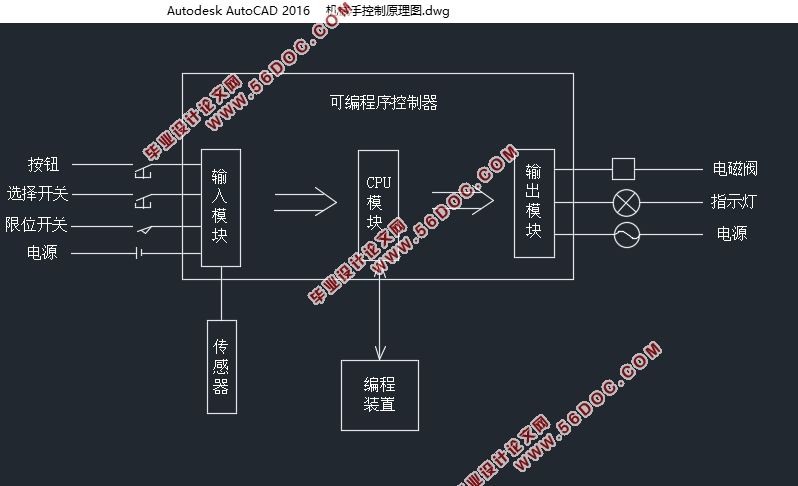
3.1 机械手控制原理 11
3.2 PLC的选型 12
3.3 西门子S7-200系列PLC的结构功能 12
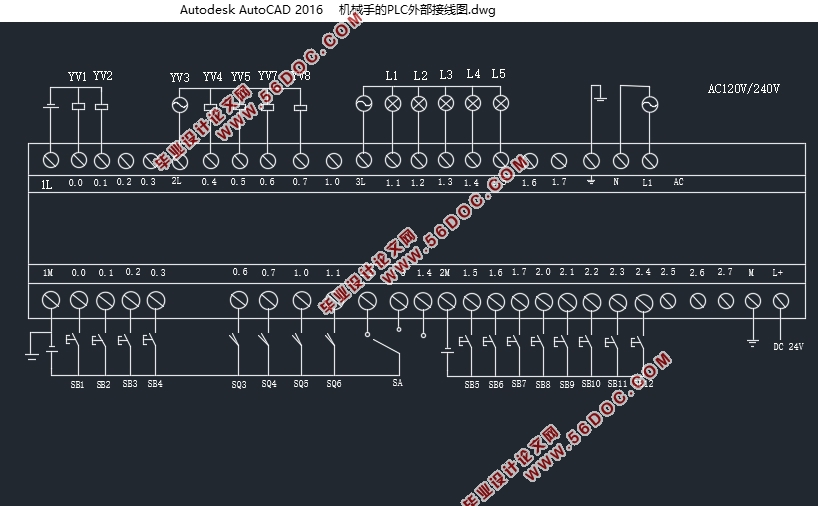
3.4 PLC的I/O资源配置 15
3.5 其他资源配置 17
第四章 控制系统的软件设计 18
4.1 程序简介 18
4.2 系统程序流程图 19
4.3 各模块程序设计 20
第五章 液压驱动系统设计 23
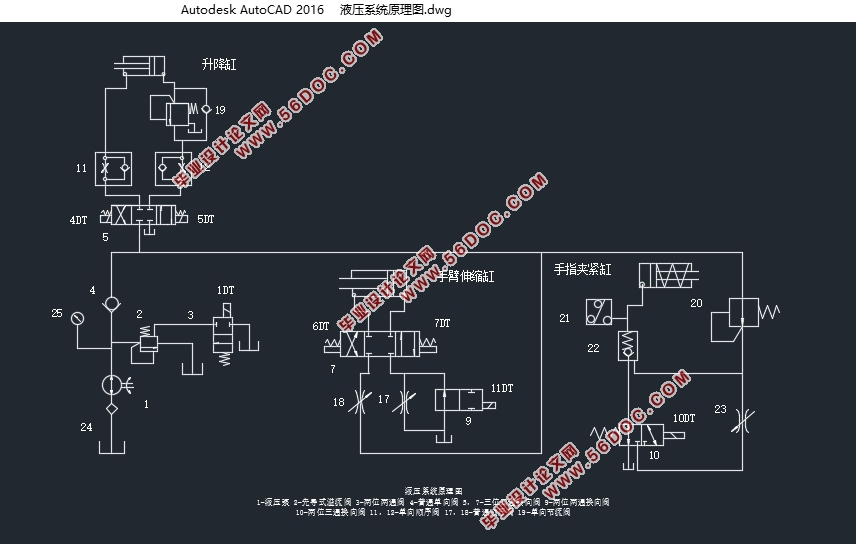
5.1 机械手液压驱动系统 23
5.2 机械手液压控制原理 23
结论 25
参考文献 26
|
