软体机械手多关节机构设计与仿真分析(含CAD图,CATIA三维图)(任务书,开题报告,论文说明书16000字,CAD图7张,CATIA三维图)
摘要
软体机械手,是采用软质材料制造的机械手。与传统的机械手相比,它使用的软材料让其响应特性更加复杂,因此设计和控制也更具有多样性。软体机械手在操作细小或易碎物体的方面有更优秀的表现。尽管软体机械手在近年来得到了飞速发展,但是软体机械手在材料、结构、驱动和控制方面,仍处于探索和发展阶段,在很多方面有研究的潜力。本文的主要研究内容如下:
(1)介绍了软体机械手的研究与发展现状,总结了国内外相关研究成果,以及常用的软体机械手驱动方式。
(2)提出了多种实现多关节机构的方案,包括使用SMA驱动器驱动,以及参考实验室方案提出的可变刚度机械手的方案。之后使用MATLAB仿真出各个方案的工作空间,并且进行比较,最后选择出最优方案。
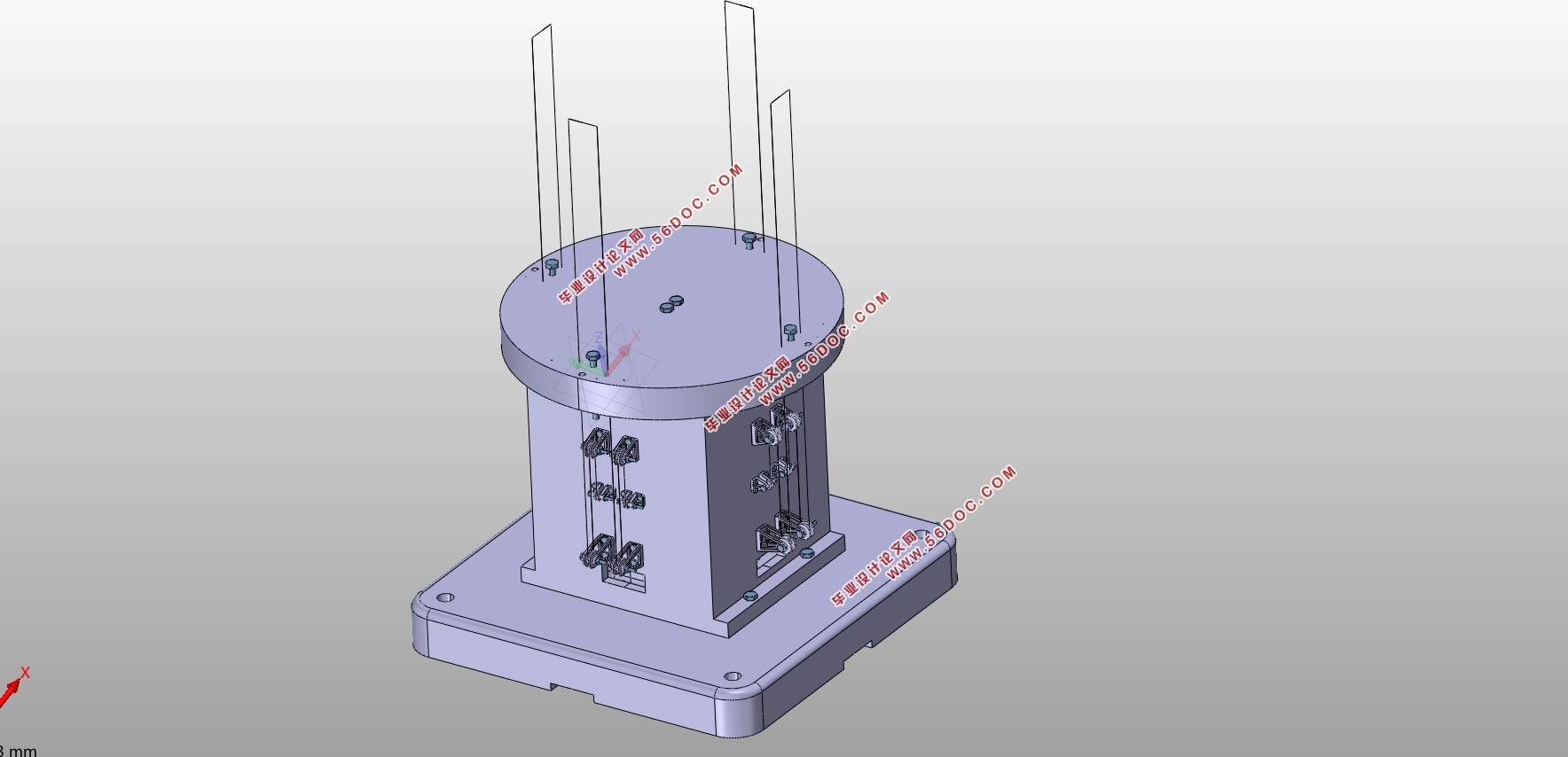
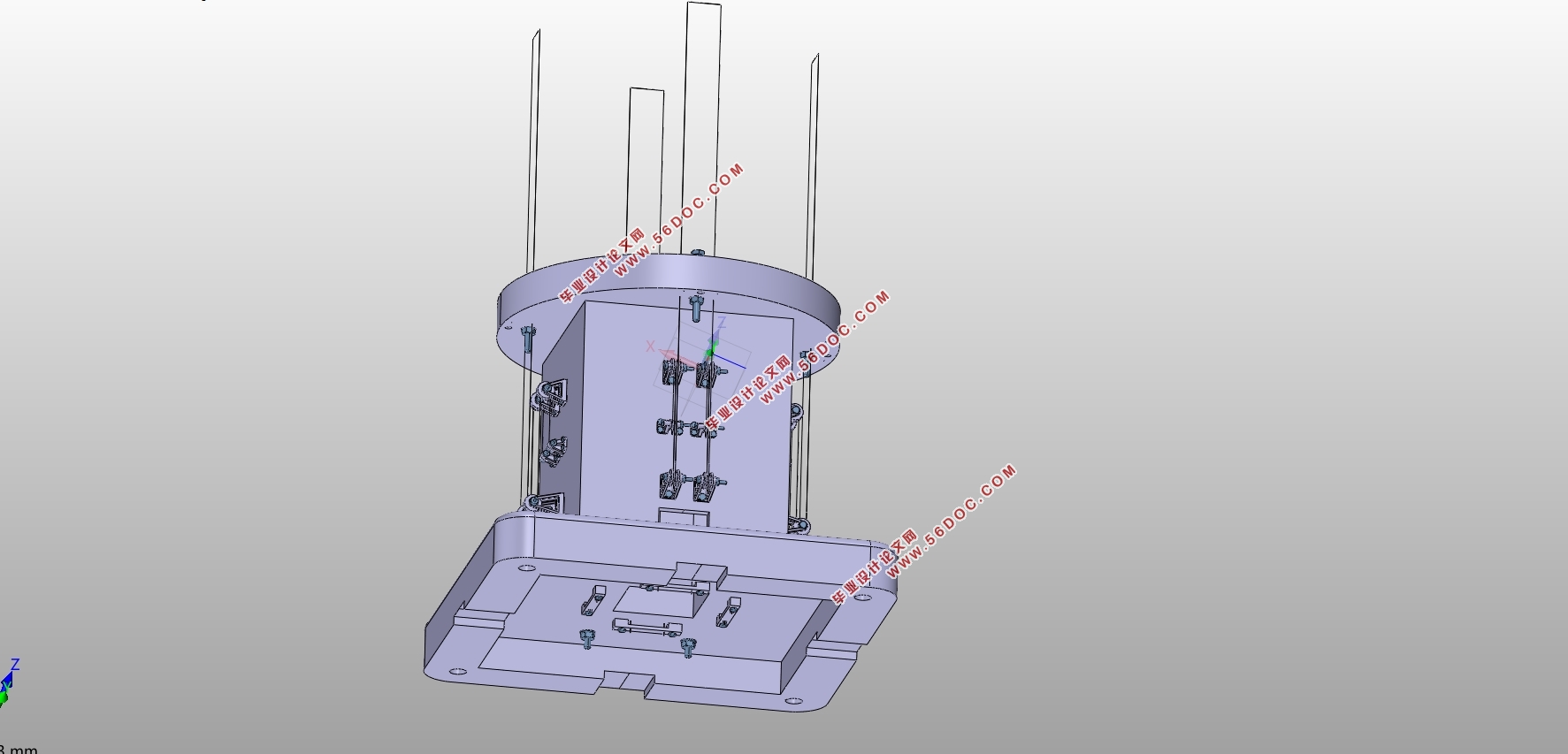
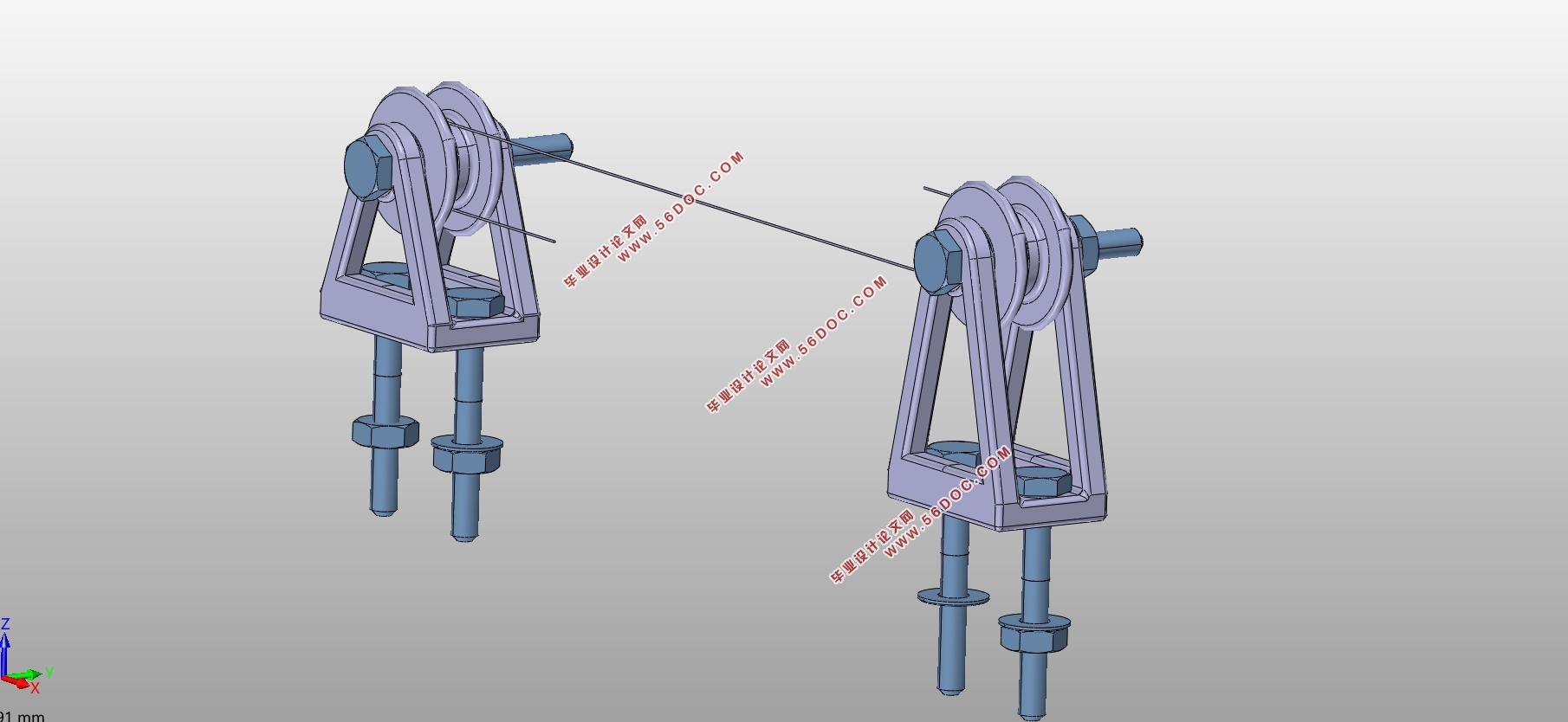
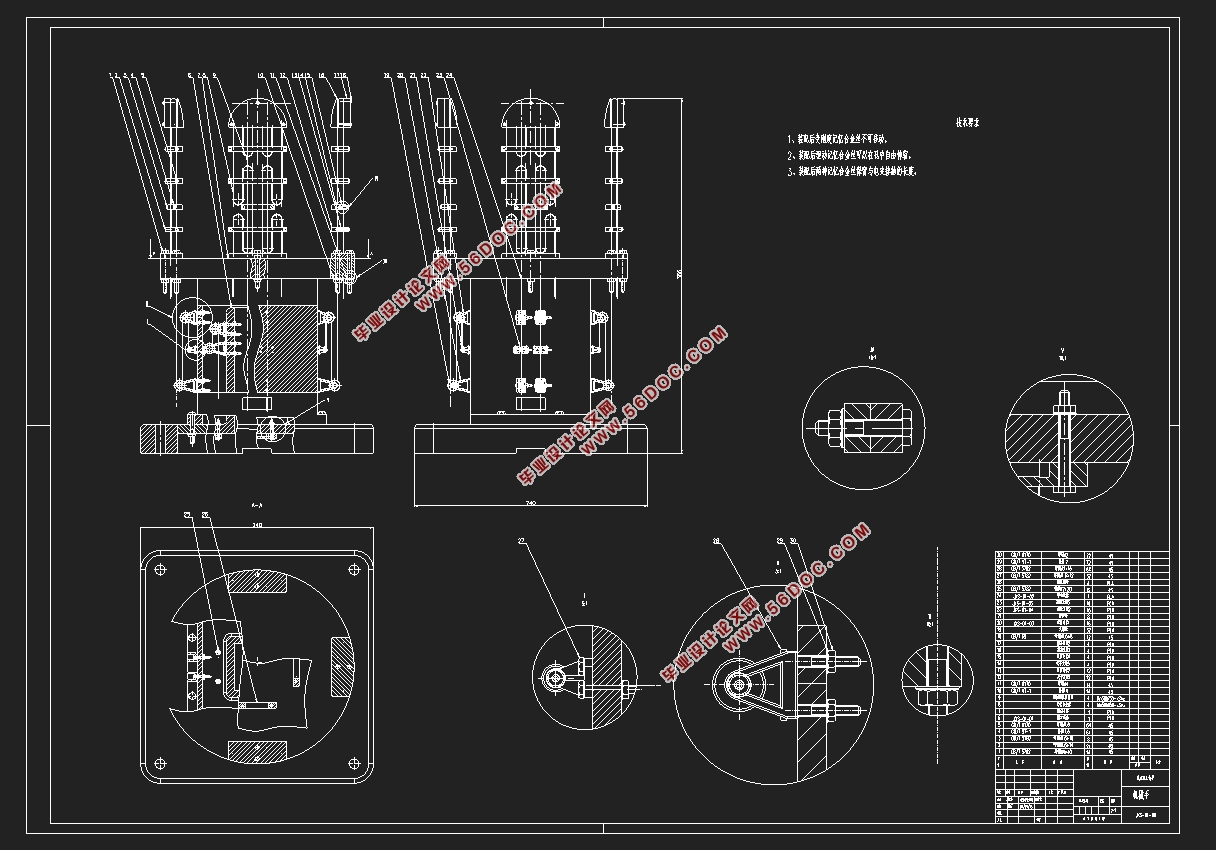
(3)基于选出方案的基础,使用CATIA软件进行了结构设计,主要包括机械手的手指,滑轮组以及固定和通电结构的设计。完成了整个软体机械手的结构设计工作。
(4)对建立的模型进行校核和仿真,使用MATLAB对软体机械手的工作空间进行仿真分析,使用ANSYS对主要承载零件进行强度校核。
论文主要研究了软体机械手多关节机构的设计方法,讨论了多种实现多关节机构的方式,并进行了比较。
研究结果表明:相比于普通软体机械手,使用多关节机构的软体机械手可操控性更好。
本文的特色:在软体机械手中加入了多关节机构的设置。
关键词:软体机械手;多关节机构;数值模拟
Abstract
A soft manipulator is a manipulator made of soft material. Compared with the traditional manipulator, the soft materials it USES make its response characteristics more complex, so the design and control are more diversified. The soft manipulator is better at handling small or fragile objects. Although software manipulators obtained the rapid development in recent years, but the software manipulator in terms of material, structure, drive and control, is still in the stage of exploration and development, has the potential to study that in many ways. The main research contents of this paper are as follows:
(1)The research and development status of the soft manipulator was introduced, and the related research results at home and abroad were summarized, as well as the common driving methods of the soft manipulator.
(2) A variety of schemes to realize multi-joint mechanism are proposed, including the use of SMA actuator and the scheme of variable stiffness manipulator proposed by reference to the laboratory scheme. After that, MATLAB was used to simulate the working space of each scheme, and the comparison was made. Finally, the optimal scheme was selected.
(3) Based on the basis of the selection scheme, the structure design was carried out using CATIA software, mainly including the design of finger, pulley block and fixed and energized structure of the manipulator. The structure design of the whole soft manipulator was completed.
(4) Check and simulate the established model, use MATLAB to simulate and analyze the working space of the soft manipulator, and use ANSYS to check the strength of the main bearing parts.
This paper mainly studies the design method of multi-joint mechanism of soft manipulator, discusses various ways to realize multi-joint mechanism, and compares them.
The results show that compared with ordinary soft manipulator, the soft manipulator with multi-joint mechanism is more maneuverable.
Features of this paper: the setting of multi-joint mechanism is added into the hands of the soft machinery.
Key Words:Soft manipulator;Multiple joint mechanism;Numerical Simulation
目录
第1章 绪论 1
1.1研究背景及意义 1
1.2国内外研究现状 1
1.2.1气动驱动 1
1.2.2绳驱动 2
1.2.3仿生材料电活性聚合物驱动 3
1.2.4电共轭液驱动 4
1.2.5形状记忆合金驱动 5
1.3论文主要研究内容 6
1.3.1测定记忆合金的参数: 7
1.3.2设计软体机械手的多关节结构: 7
1.3.3机械手结构的仿真与数据分析: 7
第2章 多关节机构的方案设计 9
2.1 基于角位移SMA驱动器的多关节机构设计 9
2.2基于变刚度思路的机械手方案设计 10
2.3两种方案的工作空间比较 11
2.3.1通过记忆合金本身的收缩来模拟手指的工作空间 13
2.3.2通过设定受力的情况模拟手指的工作空间 14
2.4结果比较 18
3章 软体机械手的结构设计 23
3.1 CATIA简介 23
3.2软体机械手手指机构的设计 23
3.3滑轮组和滑轮支架的设计 25
3.4固定和通电结构的设计 27
第4章 仿真分析与校核 29
4.1工作空间的仿真分析 29
4.2强度校核 31
4.2.1手指的强度校核 31
4.2.2固定机构的强度校核 33
第5章 总结和展望 35
5.1工作总结 35
5.2软体机械手展望 35
参考文献 37
致 谢 39
|
