基于激光脉冲测距的矿灾机器人避障系统设计(测控技术与仪器)(34000字)
摘 要
煤矿救灾机器人是一种能够在煤矿井下灾害环境遥控或自主导航工作的机器人,他能够协助或者代替救护人员进入受灾矿井内部进行环境探测和救援,可以极大地减少和避免救护人员的伤亡。机器人深入矿井内部,应当具有局部自避障能力,而机器人要想实现自主避障,首先就是要准确地识别出障碍物信息,并且能对机器人与障碍物之间距离进行实时测量。
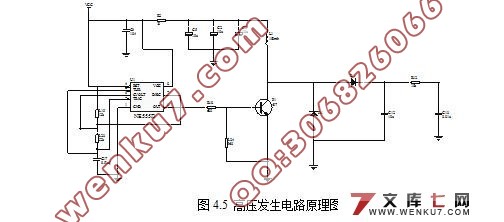
为解决以上存在问题,论文首先遵循基于行为的机器人设计思路,选用合适的传感器----激光脉冲测距仪,利用激光脉冲测距仪的原理对周围的障碍物信息进行实时监测,其次,针对煤矿救援机器人避障要求设计了全方位机械转动云台,并将测量范围从二维扩展到三维,再次,详细设计了煤矿救灾机器人避障控制系统的硬件电路,包括激光发射电路、激光接收电路、数据采集单元电路、运动控制单元电路等。
最后,对研制的煤矿救灾机器人激光测距避障系统进行了实时动态测量障碍物距离和不同材质障碍物的测距稳定性实验,结果证明了本文设计的电路系统和软件系统的有效性和可行性。
关键词:煤矿救灾机器人 ;自主避障 ;障碍物测量 ;激光测距
ABSTRACT
Coal mine rescue robot is one kind of robots used in underground destroyed coal mine. It could help even replace human beings to detect the mine’s environment and rescue, and greatly reduce and avoid the casualties. Consequently, In order to enter into the mine and explore the environment, vision based navigation is the basic technology. This thesis aims at the study and design of the binocular stereo vision for the obstacle recognition and measuring.
To solve the above problems, Firstly, the robot based on behavior follows design ideas, choose appropriate sensor, laser pulse laser rangefinder, using the principle of pulsed rangefinder surrounding obstacles information monitoring. Secondly, according to mine rescue robot obstacle avoidance requirements we design a mechanical rotating yenta .Then expand the measurement range from 2d to 3d. Thirdly, hardware circuit of robot obstacle avoidance control system is designed in detail, such as laser emission circuit, laser receiving circuit, data acquisition unit circuit, motion control unit circuit and so on.
Finally, on the development of the mine rescue robot obstacle avoidance system for laser distance measuring real-time dynamic measurement of the distance and obstacles of different materials ranging obstacles stability test, and the experiment results proved that this design of circuit systems and software systems effective and feasible.
Keywords: Obstacle Measuring; Coal mine rescue Robot; Autonomous obstacle avoidance; Laser rangefinder
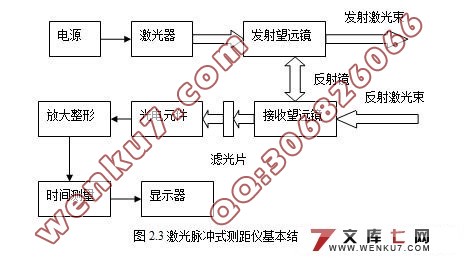
光脉冲式测距仪基本结构
当测距仪照准目标后,打开激光电源,激光器就发出一个很窄的光脉冲,这个光脉冲经过发射单元后,压缩了它的发散角。以红宝石激光器为例,其发射角一般是几个毫弧度,经过发射单元后发散角约压缩为零点几个毫弧度。在光脉冲发射出去的同时,其中极小一部分光立即通过两块反射镜而直接进入接收单元以此作为发射参考信号,用其作为标定激光发出的时间。参考信号进入接收单元后,经过虑光片到达光电转换器(由光电二极管或光电倍增管等光电元件组成),使光信号变为电信号,即将光脉冲变为电脉冲,这个电脉冲经放大整形后送至时间测量系统,使器开始计时。而射向目标的光脉冲,由于目标的反射(或漫反射)作用,使光(或部分光)从原路反射回来成为测距信号,进入接收单元,再经过虑光片、光电转换器、放大整形电路而进入时间测量系统,使其停止计时。时间测量系统所记录的时间(即参考信号与测距信号进入时间测量系统的时间差),由显示器显示出来,进而通过译码后在显示器上直接给出测距仪到目标的距离。
激光脉冲测距仪及其参数
本系统设计要求的工作环境定位为矿下,由于矿下环境恶劣,光线低暗,灰尘多,湿度、温度波动范围很大。在能见度较差和连续作业时对系统的要求较高,选择合适的传感器尤为重要,考虑到系统必须克服这些不利情况,因此通过对比现有传感器的性能,系统选用了瑞士PREXISO公司的X2型高性能的半导体激光测距仪。该种激光测距仪基于脉冲激光测量方法设计,利用半导体脉冲激光管作为发射光源进行距离测量,是应用电子、光学、激光技术准确测量距离的新一代微小型激光测距仪,它具有测量速度快、体积小、性能可靠等优点,完全满足救灾机器人避障器系统的使用要求。
X2型激光测距仪的主要技术参数:
测距性能
最小距离:0.1m
最大距离:30m
测量精确度( ):0.002m
光源性能
激光二极管 :620-690nm
颜色:红色
激光类型:二级激光
光束发散:016×0.6mrad
脉冲持续时间: s
最大发射功率:0.95mW
每脉冲最大发射功率:8mW
激光光束(激光反射光学系统发出的光束)≤Φ40mm
主要使用性能
供电:2×AAA(只留3V)
工作温度:-0℃~+50℃
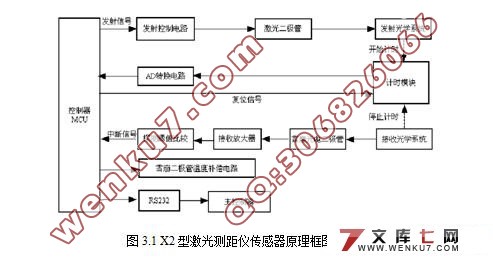
X2型激光脉冲测距仪的激光测距传感器部分的原理框图如下图所示,系统主要有发射驱动电路、接收电路、计时电路、温度补偿电路和光学系统等部分组成。

|
