摘 要
本文是设计数控机床上下料机械手,通过查阅相关资料以及对本专业知识的学习和应用,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了设计。具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计,机械手腕部的结构设计,末端执行器(手爪)的结构设计,机械手的机械传动机构的设计,机械手驱动系统的设计。同时对液压系统和控制系统进行了理论分析和计算。基于PLC对机械手的控制系统进行了设计,基本达到了预期的设计目的
关键词: 机械手; PLC; 液压伺服定位; 电液系统
Abstract
This article is designs on the numerically-controlled machine tool the yummy treats manipulator, through the consult correlation data as well as to this specialized knowledge's study and the application, to industry manipulator various part of mechanisms and the function elaboration and the analysis, has designed on one kind of circular cylindrical coordinate form numerically-controlled machine tool the yummy treats manipulator. In view of manipulator's waist place, the arm, the hand fingernail and so on various part of mechanisms as well as the manipulator control system have carried on the design. Has carried on manipulator's system design specifically, the waist place structure design, the manipulator arm structure design, mechanical skill department structural design, terminal actuator (hand fingernail) structural design, manipulator's mechanical drive organization design, manipulator driving system's design. Meanwhile has carried on the theoretical analysis and the computation to the hydraulic system and the control system. The control system has carried on the design based on PLC to the manipulator, has served the anticipated design purpose basically
Keywords: Manipulator;PLC;Hydraulic servo control;Electrohydraulic system
特定功能的数控机床上下料机械手的设计,能够比较好地体现测控技术与仪器专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
本次设计的械手主要与数控车床(数控铣床,加工中心等)组合最终形成生产线,实现加工过程(上料、下料)的自动化、无人化。目前,我国的制造业正在迅速发展,越来越多的资金流向制造业,越来越多的厂商加入到制造业。能够应用到加工工厂车间,满足数控机床以及加工中心的加工过程安装、卸载加工工件的要求,从而减轻工人劳动强度,节约加工辅助时间,提高生产效率和生产力,降低生产成本。
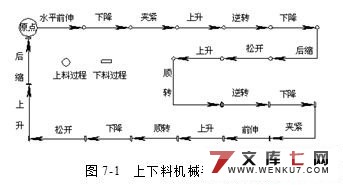
具体到本设计,因为设计要求搬运的加工工件的质量达30KG,且长度达500MM,同时考虑到数控机床布局的具体形式及对机械手的具体要求,考虑在满足系统工艺要求的前提下,尽量简化结构,以减小成本、提高可靠度。该机械手在工作中需要3种运动,其中手臂的伸缩和立柱升降为两个直线运动,另一个为手臂的回转运动,综合考虑,机械手自由度数目取为3,坐标形式选择圆柱坐标形式,即一个转动自由度两个移动自由度,其特点是:结构比较简单,手臂运动范围大,且有较高的定位准确度。
目 录 33000字
第1章 绪论 2
1.1机械手概述 2
1.2 机械手的组成和分类 3
1.3 国内外研究现状和趋势 10
1.4选题背景及设计目的 11
1.5 设 计 原 则 13
第2章 机械手的总体设计及设计方案论证 14
2.1 机械手总体结构的类型 14
2.2 设计具体采用方案 16
第3章 机械手腰座结构的设计 17
3.1 机械手腰座结构的设计要求 17
3.2 设计具体采用方案 18
第4章 机械手手臂及手腕和手部的结构设计 19
4.1 机械手手臂的设计要求 19
4.2 机械手腕部的结构设计 22
4.3机械手末端执行器(手爪)的结构设计 24
4.4机械手的机械传动机构的设计 27
第4.5节 机械手驱动系统的设计 32
第5章 机器人手臂的平衡机构设计 42
5.1机器人平衡机构的形式 42
5.2设计具体采用的方案 43
第6章 理论分析和设计计算 44
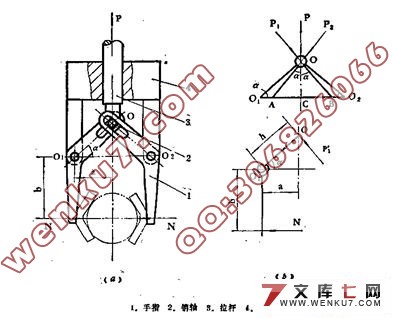
6.1机械手手部设计计算 44
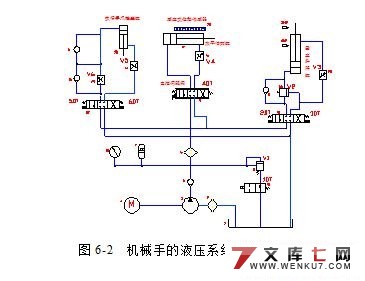
6.2 确定液压系统基本方案 45
6.3 电机选型有关参数计算 57
第7章 机械手控制系统的设计 61
7.1机械手工艺过程与控制要求 61
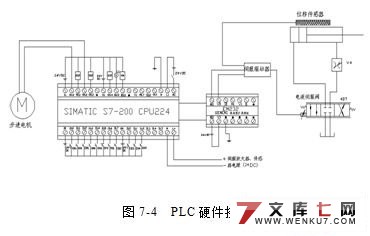
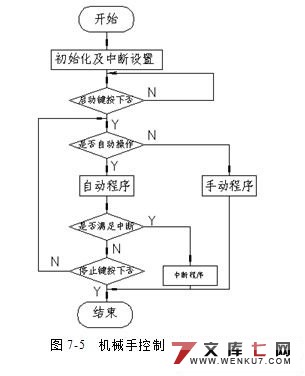
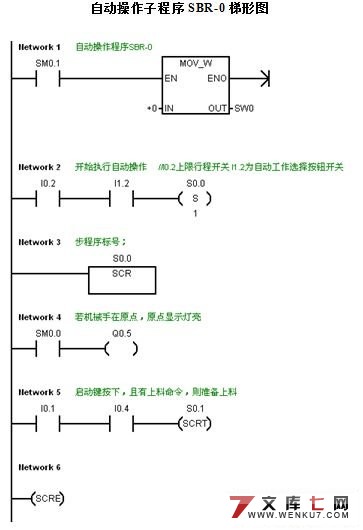
7.2机械手控制系统软件设计 70
结 论 72
参考文献 73
翻译部分 76
英文原文 76
中文译文 84
致 谢 89
附录1 90
第1章 绪论
参考文献
1 付永领, 王岩, 裴忠才. 基于CAN总线液压喷漆机器人控制系统设计与实现. 机床与液压. 2003, (6): 90~92
2 丁又青, 朱新才. 一种新型型钢翻面机液压系统设计. 机床与液. 2003, (5): 128~129
3 刘剑雄, 韩建华. 物流自动化搬运机械手机电系统研究. 机床与液压. 2003, (1): 126~128
4 徐轶, 杨征瑞, 朱敏华, 温齐全. PLC在电液比例与伺服控制系统中的应用. 机床与液压. 2003, (5): 143~144
5 胡学林. 可编程控制器(基础篇). 北京: 电子工业出版社, 2003.
6 胡学林. 可编程控制器(实训篇). 北京: 电子工业出版社, 2004.
7 孙兵, 赵斌, 施永康. 基于PLC的机械手混合驱动控制. 液压与气动. 2005, (3): 37~39
8 孙兵, 赵斌, 施永康. 物料搬运机械手的研制. 机电一体化. 2005, (2): 43~45
9 王田苗, 丑武胜. 机电控制基础理论及应用. 北京: 清华大学出版社, 2003.
10 李建勇. 机电一体化技术. 北京: 科学出版社, 2004.
11 王孙安, 杜海峰, 任华. 机械电子工程. 北京: 科学出版社,2003.
12 张启玲, 何玉安. PLC在气动控制称量包装装置中的应用. 液压与气动. 2005, (1): 31~33
13赵文. 数字控制技术在龙门刨床电控系统中的应用. 电气传动. 2005. 35 卷(3): 55~57
14 沈兴全, 吴秀玲. 液压传动与控制. 北京: 国防工业出版社, 2005.
15 王宪军, 赵存友. 液压传动. 哈尔滨: 哈尔滨工程大学出版社, 2002.
16 徐灏等. 机械设计手册. 第5卷. 北京: 机械工业出版社, 2000.
17陈铁鸣, 王连明, 王黎钦. 机械设计(修订版). 哈尔滨: 哈尔滨工业大学出版社, 2003.
18 邓星钟. 机电传动控制(第三版). 武汉: 华中科技大学出版社, 2001.
19 西门子自动化与驱动集团(SIEMENS AG). S7-200系统手册. 2002.
20 蔡行健. 深入浅出西门子S7-200 PLC. 北京: 北京航空航天大学出版社, 2003.
22 张利平. 现代液压技术应用220例. 化学工业出版社, 2004.
23 高西林. 锻床上料机械手. 轻工机械. 2001, (2):
24 李春波, 王大明, 李哲, 王祖温. PLC控制的气动上下料机械手. 液压气动与密封, 1999. 12. (6): 21~24
25 尹自荣, 熊晓红, 骆际焕, 王建坤. 数控上下料机械手的研究及应用.. 2000, (6): 3~5
26 张波, 李卫民, 尚锐. 多功能上下料用机械手液压系统. 2002, (8): 31~32
27 侯沂, 刘涛. 装卸机械手设计研究. 机械. 2004, 第31卷 (6): 53~54
28 叶爱芹, 袁金强. PLC在机械手控制系统中的应用. 安徽技术师范学院学报. 2001, 15卷(4): 64~65
29 王会香, 孙全颖. 自动涂胶机械手的PLC控制. 哈尔滨理工大学学报. 2002,7卷(5): 16~18
|