基于电磁感应传感器的智能车系统设计(直立双驱动)(CAD,程序,电路图)(任务书,开题报告,毕业论文19000字,cad图1张,电路图,录像,答辩PPT)
摘 要
本设计运用Freescale XS128单片机控制模型车自动沿着导线赛道完成比赛。本设计主要包括智能车的组装、机械机构的调整、系统方案和控制策略的选定、硬件电路和软件控制的设计等几部分。
工作方式简介:首先是根据陀螺仪测出的角速度信号和MMA7260加速度传感器的电压信号,经过AD转换,在逻辑处理器中使用特定的算法,输出电机信号使直立小车保持平衡。使用电磁传感器电感采集跑道信号,把信号传送到MC9S12XS128主芯片进行处理,运用控制策略识别出赛道的导线和路况,控制转速和转向,使小车顺利完成比赛,在此基础上,再提高小车速度,对小车行驶路径进行优化。
关键词:智能车;电感;XS128;陀螺仪;MMA7260;直立平衡
Intelligent Vehicle Systems Based On Electromagnetic Induction Sensors Design
(Upright Dual-Drive)
Abstract
The use of design Freescale XS128 single-chip control model car automatically track along the wire to finish the race. The design includes the assembly of the smart car to mechanical agencies, system solutions and control strategies selected, the hardware circuit and software control design parts.
Introduction of the work: first, the gyroscopes measure the angular velocity signal and the the MMA7260 acceleration sensor voltage signal after AD conversion, the specific algorithms used in the logical processor, output motor signals to the upright car to maintain a balance. Electromagnetic sensors Inductive acquisition runway signals, the signal is sent to MC9S12XS128 the main chip for processing, use of control strategies to identify the circuit wires and road conditions, speed control and steering, so the car to the successful completion of the game, on this basis, a further increase car speed car traveling path optimization.
Keywords: Inductance; XS128; gyroscope; MMA7260; upright balance
整车设计思路
控制系统
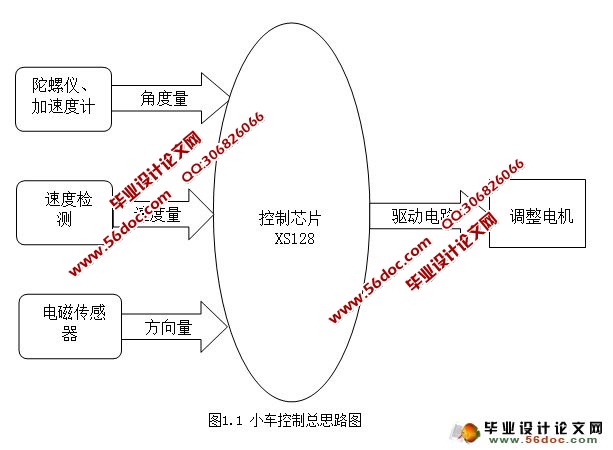
智能车的工作模式如下图所示:陀螺仪测得的角速度和MMA7260测得角加速度,把其信号输入XS12控制核心,分别对信号积分和微分进行叠加得出输出控制信号,控制电机使车实现平衡。通过测速传感器获得实际速度,信号输入XS12,可在平衡的前提下是小车静止或以某个速度运动,这一点在整个设计至关重要。电磁传感器获取道路某点电磁特性,信号输入到S12控制核心,进行进一步处理以获得赛道信息;通过片上AD检测电池电压。电机转速控制采用PID控制,通过PWM控制驱动电路调整电机的功率。
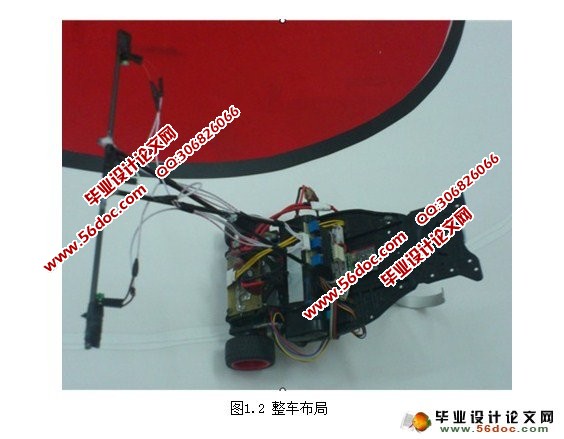
整车布局
鉴于小车和道路的特点,并且车模不变,今年在整车布局上仍延续基本布局的思路,基本设计要求方向:重心尽量低、重量尽量轻、结构尽量紧凑、简单。采用低重心紧凑型设计,为调整整车重心位置,采用碳杆支撑电磁传感器,减小转动惯量。 在降低整车重心方面采用了低位主板的布局,同时设计了强度高质量轻的电磁传感器安装架,减轻信号采集电路板重量,降低电池架高度,降低小车前方底盘高度。
目录
1 引言 1
1.1 概述 1
1.2课题设计的研究意义 2
1.3 整车设计思路 4
1.3.1 控制系统 4
1.3.2 整车布局 4
1.3.3 电磁车主要特点 5
1.4 本章小结 7
2 硬件系统设计 8
2.1 传感器方案设计 8
2.1.1 传感器的选择 8
2.1.2 传感器的布局 8
2.2 倾角传感器方案 9
2.2.1 加速度传感器 9
2.2.2 角速度传感器-陀螺仪 12
2.3 主板电路设计 15
2.3.1 电源模块 15
2.3.2 放大模块 16
2.3.3 驱动模块 18
2.3.4 速度检测 18
2.3.5 各模块接口 21
2.4 最小系统板 21
2.4.1 MC9S12XS128B最小系统设计 21
2.4.2 时钟电路 22
2.4.3 串行口的RS-232驱动电路 23
2.4.4 电源电路 23
2.4.5 复位电路 24
2.4.6 BDM接口 24
2.4.7 单片机并行口及驱动能力 24
2.5 其它外设 25
2.6 本章小结 26
3 机械设计 27
3.1 传感器的安装 27
3.2 车模的机械调校 27
3.2.1 底盘高度 27
3.2.2 差速调整 27
3.2.3 后轮机械调节 28
3.3 车模安装 29
3.4 本章小结 29
4 软件设计 30
4.1 主流程序 30
4.2 DSC的硬件资源配置 32
4.3 算法框图与控制函数关系 33
4.4 主要控制函数说明 34
4.4.1 AngleCalculate:角度计算函数 34
4.4.2 AngleControl: 直立控制函数 36
4.4.3 SpeedControl: 速度控制函数 36
4.4.4 DirectionControl:方向控制函数 38
4.4.5 MotorOut:电机输出函数 39
4.4.6 中断服务程序 40
4.5 本章小结 42
5 开发与调试 43
5.1 开发环境的应用 43
5.2 BDM调试器的使用 45
5.2.1 Hiwave初始参数设置 45
5.2.2 程序下载 47
5.3 程序调试 47
5.4 本章小结 49
总结 50
参考文献 51
致谢 52
附录A 53
附录B 63
|
