Abstract
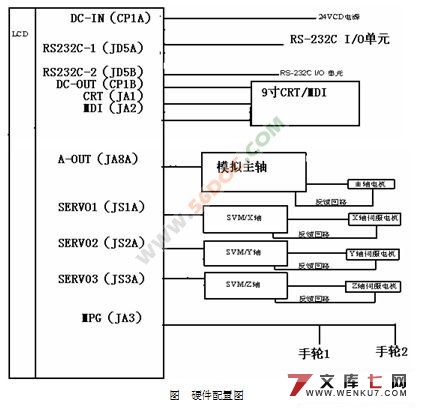
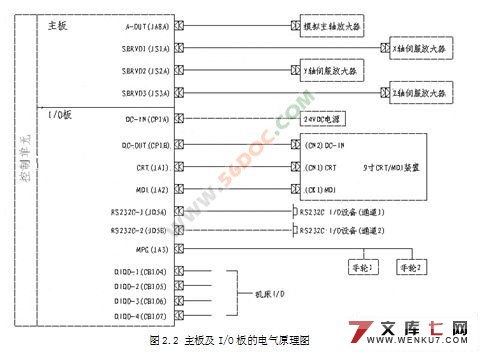
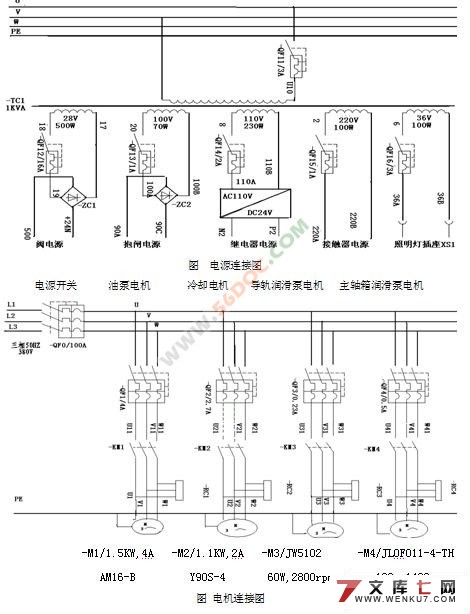
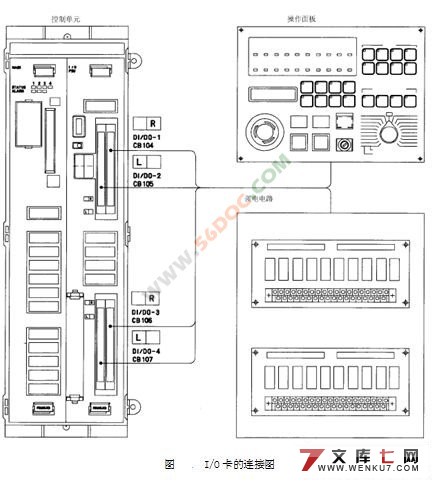
In this issue, FANUC - 0i-MA control scheme is put into use in XK716 machine transformation, and the hardware and electrical diagram of NC system is designed, finally a semi-closed loop setting is completed. Meanwhile the accuracy of the semi-closed loop is improved by using pitch error compensation and backlash compensation. Servo parameter and CNC basic parameter are set and adjusted according to the mechanical structures and the control request of the machine tool. PMC is programe for machine control is redesigned and the system is put into mold production.
Key words:CNC system;Electrical schematic diagram;The error compensates; Parameter;