船舶航向控制器设计(MATLAB,附仿真程序)
来源:wenku7.com 资料编号:WK718725 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK718725
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
船舶航向控制器设计(MATLAB,附仿真程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文15400字,仿真程序,答辩PPT)
摘 要
本文对反向递推(Backstepping)设计方法在非线性船舶航向控制器中的应用进行了研究。Backstepping设计方法是近几年兴起的一种基于Lyapunov稳定性理论的比较先进的非线性控制方法。因此,本文首先对目前常见的非线性控制方法进行了概述,简单的介绍了Lyapunov稳定性理论及Backstepping算法设计原理,进而对Backstepping设计方法进行了比较研究,总结出 Backstepping方法的优点及局限;然后本文根据目前船舶航向控制中普遍存在的两个问题:船舶操纵运动的非线性及船舶响应模型存在不确定性进行了讨论,分别应用Backstepping方法及自适应Backstepping方法设计了静态的和动态的船舶航向控制器,使系统在平衡点全局渐近稳定,并取得了很好的控制跟踪效果。
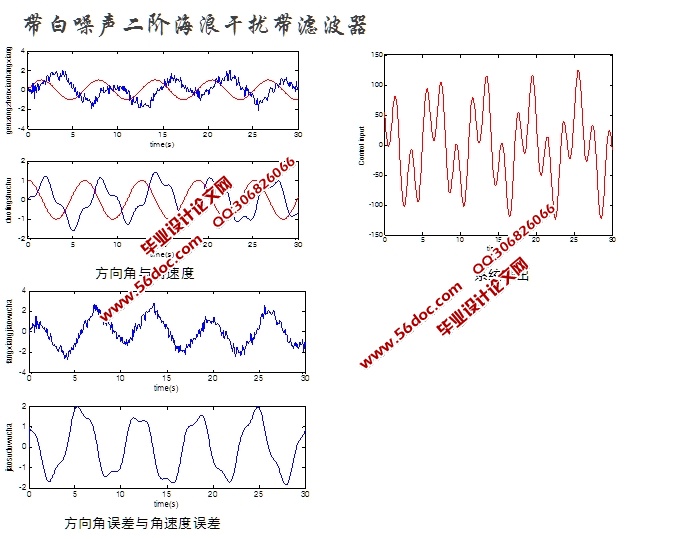
本文对Backstepping设计方法与精确反馈线性化方法进行了系统的比较研究,通过系统仿真得出Backstepping设计方法实现船舶航向稳定。从而减少了航向误差。
关键词:船舶航向控制;Backstepping反向递推方法;自适应控制;非线性;李亚普诺夫函数
Abstract
Backstepping design and its applications to nonlinear ship steering are systemically studied in this paper. Backstepping design is a new recursive nonlinear control methodology which associated with Lyapunov stabilities theory. After a brief review of conventional nonlinear system control theory and Lyapunov stability, we introducesbasic backstepping tools in this thesis. Then it concludes its advantages and disadvantages by comparison Backstepping and Absolute Feedback Linearization methods. Now two problems listed below are difficult to solve in ship steering controller designs: 1) nonlinear maneuvering characteristics in ship steering;2)uncertai-
nty in nonlinear ship responded model. In this paper, it will show how Backsteeping can be applied to solve these problems successfully.
Backstepping is related to Absolute Feedback Linearization. However the latter requires precise models and cancels all nonlinearities but Backstepping not. It exploits "good" nonlinearities while "bad" nonlinearities are dominated. So the controller's energy can be reduced and the robustness obtained.
Keywords:Shipsteering;control;Backstepping;design;Adaptivecontrol;Nonlinear; Lyapunov function
本文针对Backstepping反向递推设计在理论和在船舶航向控制中的应用进行了详细的论述,并着重讨论了在理论研究和学习过程中的一些心得,和在理论应用到实际过程中的一些自己的设计思想。
论文的结构安排如下:第一章简述了论文选题的背景、目的和意义,即非线性控制方法概述、Backstepping反向递推设计方法的发展历史及应用到船舶航向控制中的意义;第二章简要介绍了Lyapunov函数稳定性,详细阐述了积分式backstepping反向递推算法原理为下一步设计奠定了基础;第三章介绍了非线性船舶运动数学模型;第四章详细介绍Backstepping船舶自动舵设计,及含有不确定项非线性船舶自动舵自适应Backstepping设计,仿真结果等。
目 录
第1章 概 述 1
1.1课题研究的背景意义 1
1.2研究现状 4
1.3论文的结构 4
第2章Lyapunov稳定性理论及反向递推基本理论 6
2.1 Lyapunov稳定性 6
2.2 Lyapunov直接法 7
2.3积分器 Backstepping 8
2.4本章小结 12
第3章 非线性船舶操纵运动数学模型 13
3.1船舶平面运动坐标系 13
3.2船舶操纵特性 14
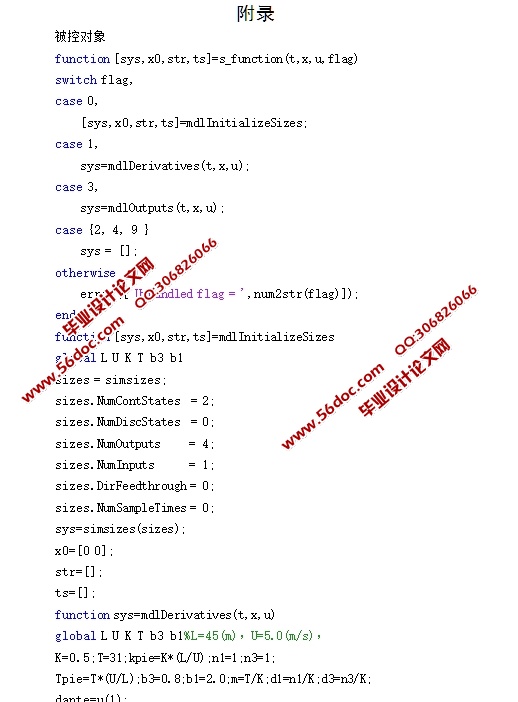
3.3非线性船舶操纵运动的数学模型 14
3.4舵机的数学模型 15
3.5环境扰动的数学模型 16
3.6本章小结 17
第4章 船舶航向控制器设计 18
4.1船舶航向控制的性能指标 19
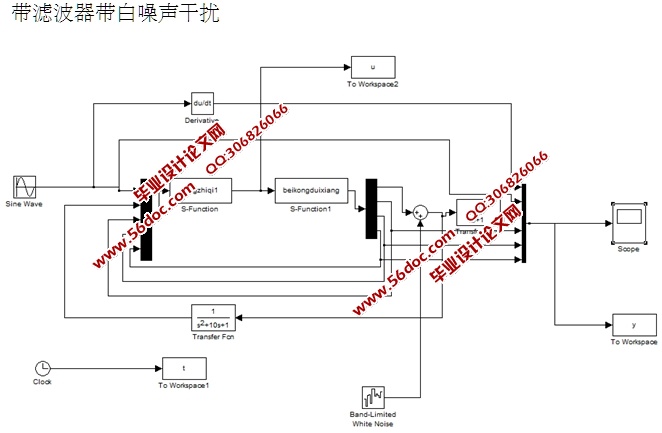
4.2滤波 20
4.3非线性船舶自动舵Backstepping设计 21
4.4含有未知常参数的船舶操纵运动模型 24
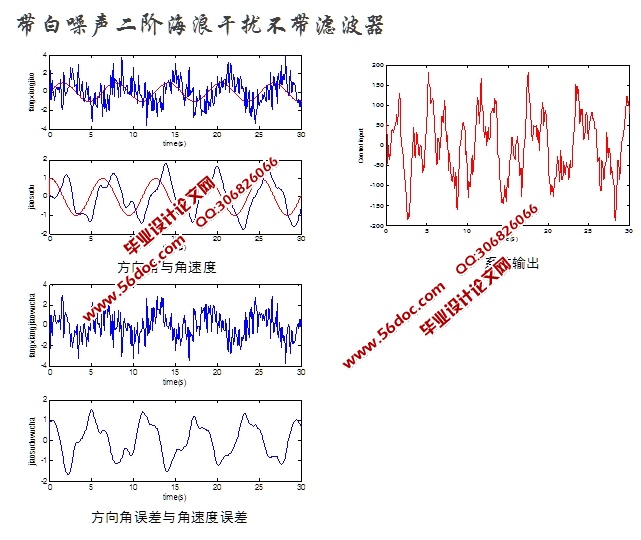
4.5仿真结果 27
4.6本章小结 29
结 论 31
致 谢 32
参考文献 33
|
