惯性传感器定位系统研究
来源:wenku7.com 资料编号:WK73416 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK73416
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
惯性传感器定位系统研究(包含选题审批表,任务书,开题报告,中期报告,毕业论文16000字)
摘 要:针对农用机械特别是南方水田耕作机械在生产作业中定位难、制导精度不高的情况,为实现其定位精、自动化程度高的要求,提出了以AT89C51单片机为中央处理器和基于数字PID的控制算法的惯性传感器定位系统。该系统通过光电编码盘和陀螺仪进行数据采样,然后执行数字PID控制,输出控制量调节执行机构触发端的通断,从而实现对作业机械精确定位的控制。结果表明:将该惯性定位系统同单片机和数字PID控制算法结合使用,能提高系统的定位精度,达到南方水田耕作机械小面积作业的定位要求。
关键词:定位;光电编码盘;陀螺仪;单片机;PID
Inertial Sensor Positioning System Research
Abstract: Referring the situation of agricultural machinery, especially southern paddy field farming machinery, having difficulty in positioning and low precision in control, to realize its high precision positioning and high-degree- automation demand, this paper introduce a orientation system of inertia sensor based on the central processor singlechip AT89C51 and digital PID control method. This system samples date through photoelectricity-coding-disk and gyroscope, then carries on a PID control,meanwhile,outputs the control quantity to adjust the angle of flow of administer-machine controlled. Thus the system control precision positioning. The results shows that the orientation system of inertia sensor can increase the precision of positioning of system and achieve the positioning demand of southern paddy field farming machinery small areas of work,through the singlechip and digital PID control method used in combination.
Key words: positioning; photoelectricity-coding-disk; gyroscope; singlechip; PID
1.研究目的
研究和设计成本更低、性能良好的惯性传感器定位系统。
2研究内容和方法
1) 加速度计选材;
2) 角速度传感器(陀螺)选材;
3) 制作单、双、三轴组合IMU(惯性测量单元);
4) 准备AHRS(包括磁传感器的姿态参考系统);
5) 各个硬件单元电路设计;
6) 各个单元软件程序设计。
调研市场上惯性传感器的优缺点——研究惯性传感器的总体方案——方案可行性论证――根据设计要求选择惯性传感器芯片--设计存储、标准串口通信电路等硬件电路――系统软件设计——样机制作——性能试验——样机改进
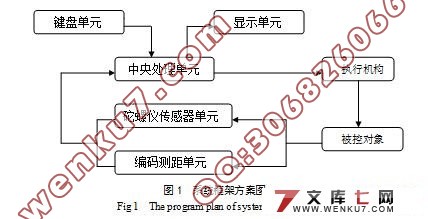
3.1 系统框架结构设计
惯性传感器定位系统包括硬件电路和软件设计部分。硬件电路部分主要包括中央处理单元、编码测距单元、陀螺仪传感器单元、执行单元、键盘单元及显示单元等。由编码测距单元和陀螺仪传感器单元实时对机械的速度、位移和航向进行信息采集,经转换后把数据传送给中央处理器,中央处理器进行分析处理后,通过数字PID控制算法将指令送入执行机构进行机械的行进控制,并在显示电路进行数据显示。
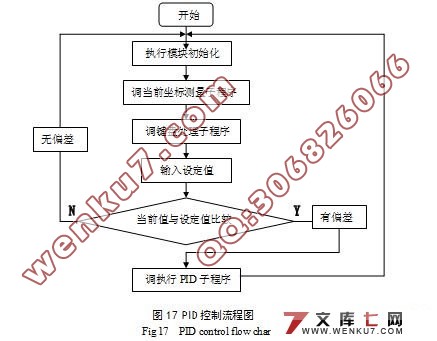
软件部分主要完成信息采集,并由AT89C51单片机对编码测距和角速度传感器陀螺仪的相关数据进行分析,将得出的数据结果与设定值进行比较,采用PID控制算法对执行机构实现控制,保证定位精度。
3.2 定位试验平台结构组成
轮式车辆有多种结构形式,常用的有三轮车辆和四轮车辆,相比较而言,四轮车辆结构复杂,设计试验周期长,所以本设计采用自制的前轮驱动并可转向的三轮小车进行试验研究。
如下图2所示的试验小车实物图,试验用的小车为前轮驱动、转向并制动,后轮随动型。试验小车由车架和控制器组成,控制器部分包括中央处理单元、传感器单元、执行单元、键盘和显示单元等。

目 录
摘要…………………………………………………………………….….................I
Abstract…………………………………………………………………….….........II
1绪论………………………………………………………………….….................x
1.1选题依据以及选题意义……………………………….………….……….x
1.1.1 选题依据……………..……………………………………………….x
1.1.2 选题意义……………..……………………………………………….x
1.2国内外研究现状及发展趋势………………………………...………..…...x
1.2.1 国内研究现状及发展趋势…………………….………...……….…...x
1.2.2 国外研究现状及发展趋势…………………….………...……….…...x
1.3 本课题的研究内容、方法以及预期成果……………………………..….x
1.3.1 研究内容…………………………………………….……….…….….x
1.3.2研究方法……………………………………………..………….….….x
1.3.3 预期成果…....……………………………………...………………….x
2 前言…………………………………………………………….….…x
2.1研究背景和思路………………………………………………...…………..
3 总体方案设计………………………………………………………......…….x
3.1 系统设计……………………………………...………..…...x
3.1.1 系统框架结构设计………………………………………...…..x
3.1.2 定位试验平台结构组成…………………..…….…..………....…....x
4 定位原理设计…………………………………………………….………..…….x
4.2编码盘测距……………………………………………………..….…...x
4.2.1 编码盘测距方案原理设计…………………..……………………..…..x
4.2.2 编码盘测距方案选择和数据分析..……………………………….....x
4.3陀螺仪测角度………………………………………….……………..….…..x
4.3.1 陀螺仪的分类和原理………………………………………….….……x
4.3.2 陀螺仪测角度原理……………………………………………….….…x
4.3.3 陀螺仪测角度试验和数据分析…………………………….………x
5 软件方案设计……………………….…………………………….….…x
6 硬件方案设计……….……...…………......……………………..…...x
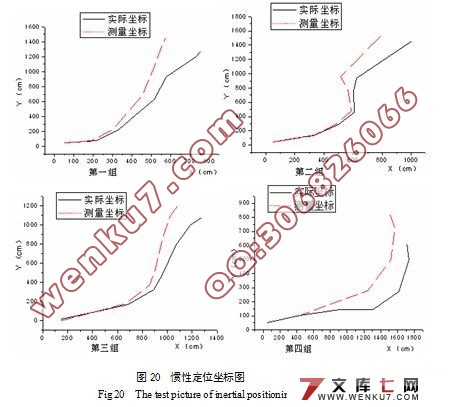
7 惯性定位试验和数据分析………..………….....…….x
结论…………………………………………………………………………...……...x
参考文献………………………………………………………………...…...………x
致谢……………………………………………………………………...…...………x
附录…………………………
附录
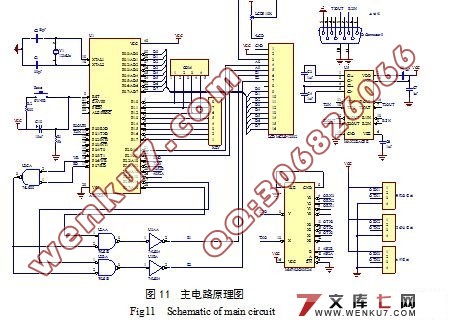
附录1:主电路原理图
附录2:编码盘模块电路原理图
附录3:陀螺仪模块电路原理图
附录4:执行模块电路原理图
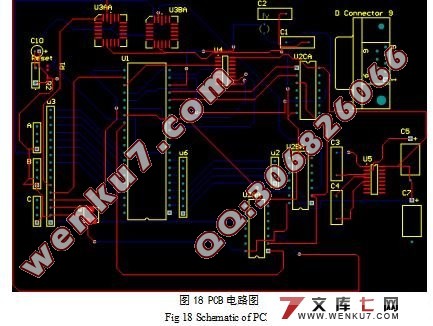
附录5:电路PCB图
|
