ЛљгкPIDПижЦЕФ1/4ГЕСОжїЖЏаќМмЗТецбаОП(ШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,ТлЮФЩшМЦЫЕУїЪщ24000зж)
еЊ вЊ
аќМмЪЧвЛИіЙиМќзщГЩВПЗжЃЌЦћГЕСуВПМўЃЌДгЖјБЃжЄЩэЬхЛђГЕТжгыжїЛњЯЕЭГжЎМфЕФЕЏадНгДЅЃЌВЂПЩвдДЋЪфИКдиЃЌЛКНтГхЛїЃЌеёЖЏКЭЕїећГЕЩэзДЬЌЕФЫЅМѕЃЌжБНггАЯьЕНЦћГЕЕФГЫзјЪцЪЪадКЭВйзнЮШЖЈадЁЃ
ЫцзХШЫУЧЖдЯжДњЦћГЕГЫзјЪцЪЪадКЭааЪЛАВШЋадЕФвЊЧѓгњРДгњИпЃЌЩшМЦвЛИізлКЯадФмСМКУЕФаќМмЃЌвбГЩЮЊЯжДњЦћГЕбаОПЕФвЛИіВржиЕФПЮЬтЁЃДЋЭГЕФБЛЖЏаќЙвЯЕЭГЕЏадЙЙМўИеЖШКЭзшФсМѕе№дЊМўЪЧВЛБфЕФЃЌЦћГЕааЪЛЕФТЗПіЃЌИКдиБфЛЏКЭЦфЫћвђЫиЕФгАЯьЃЌвђДЫЃЌБиаыжЦЖЈвЛИіБЛЖЏаќМмВЛЭЌЕФаТЕФаќЙвЁЃжїЖЏаќМмЪЧЛљгкЯжДњПижЦРэТлКЭЕчзгММЪѕЕФЗЂеЙКЭПЊЗЂЃЌгыГЕСОЕФдЫаазДЬЌЃЌПЩвдздЪЪгІЕиИФБфЦфИеЖШКЭзшФсВЮЪ§ЃЌОпгагХСМЕФзшФсадФмКЭВйзнЮШЖЈадЃЌЮДРДЦћГЕЕѕПђМмЕФвЛИіживЊбаОПЗНЯђЁЃ
БОТлЮФЯШИљОнХЃЖйЖЈРэЃЌдЫгУГЕСОЖЏСІбЇРэТлЃЌНЈСЂСЫБЛЖЏаќМмКЭЖўздгЩЖШ1/4жїЖЏаќМмЯЕЭГЕФЖЏСІбЇФЃаЭЁЃВЂНЈСЂСЫТЗУцЪфШыЗжБ№ЮЊЃКАздыЩљаХКХЁЂНздОаХКХвдМАе§ЯваХКХЕФТЗУцВЛЦНЖШЪ§бЇФЃаЭЁЃЭЌЪБЃЌИХЪіСЫаќМмадФмЕФШ§ИіЦРМлжИБъЃЌМДГЕЩэМгЫйЖШЁЂаќМмЖЏФгЖШЁЂТжЬЅЖЏдиКЩЁЃВЂРћгУШэМўMatlab/SimulinkЙЙНЈГіЦћГЕаќМмПижЦЯЕЭГЗТецФЃаЭЭМЃЌАќРЈТЗУцЪфШыФЃаЭЃЌБЛЖЏаќМмФЃаЭЃЌPIDПижЦжїЖЏаќМмФЃаЭЁЃдЫааЗТецФЃаЭЭММДПЩЪЕЯжВЛЭЌТЗУцЪфШыаХКХЕФаќМмЯЕЭГЕФЗТецЁЃзюКѓЃЌЖдаќМмадФмЦРМлжИБъЕФЗТецНсЙћНјааЗжЮіЁЃ
ЙиМќДЪЃКжїЖЏаќМмЃЛMATLABЃЛНЈФЃЃЛPIDПижЦЃЛЗТец
Abstract
Suspension is an component of the important assembly of the automobile, it guarantees to contact with a flexible between the wheels or axles and bearing system, and can transfer loadsЁЂrelax impulsionЁЂreduce vibration and regulate the body position of the vehicle in traffic, and have a direct impact on ride comfort and operate stability.
With the increasing requirement of the vehicle's ride comfort and road security, the design of suspension with good performance has become more and more important. As a traditional passive suspension having a constant spring stiffness and damper coefficient which is not interfering with the road surface and the load change, so it is necessary to design a new style suspension. Active suspension and modern control theory and development of electronic technology, and its stiffness and damping coefficients can prosper, to adapt to different working environment, improve vehicle ride comfort and road holding. So it is significant to research and develop active suspension.
Firstly, according to the Newton theorem, the paper use the vehicle dynamics theory, and set up the dynamics model of the passive suspension and the second freedom active suspension system based on 1/4 of the body. And translate the differential equations into a form of expression of the state equations. And establish the road roughness mathematical model of the road input signal for sine, step random and white noise signal, and achieve the simulation. At the same time, outlined the three evaluation index of the suspension performance, such as the body vertical acceleration, the relatively dynamic load of the wheel, the suspension dynamic deflection. And build the simulation model plans of the control system of the automobile suspension by the Matlab/Simulink software, including the importable model of the road, the passive suspension model, the active suspension model of the PID control. And run the simulation model map to achieve the simulation of the different input signal of the suspension control system. Finally, analysis the simulation results of the evaluation index of the suspension performance .
Key words: Active suspension; MATLAB; Modeling; PID control; Simulation
БОТлЮФжївЊбаОПФкШн
БОТлЮФбаОПЕФЪЧЛљгкСНздгЩЖШ1/4ГЕСОжїЖЏЕФаќМмЕФдкPIDПижЦВпТдЯТНјааЗТецбаОПЃЌвдl/4жїЖЏЕФаќМмЮЊбаОПЕФЖдЯѓЃЌНЈСЂl/4жїЖЏаќМмЪ§бЇМђЛЏФЃаЭЃЌдкЖдБЛЖЏаќМмКЭPIDПижЦЕФжїЖЏаќМмНјааБШНЯЗжЮіЃЌбаОПЕФжївЊФкШнАќРЈЃК
1ЁЂНЈСЂ1/4аќМмЪ§бЇФЃаЭ
НсКЯЦћГЕаќМмЕФЪЕМЪЧщПіЃЌбЇЯАВЂдЫгУдЫЖЏбЇКЭЖЏСІбЇМАГЕСОЙЙдьЯрЙиРэТлЃЌЖдЦћГЕаќМмЯЕЭГНјааМђЛЏЗжЮіЃЌНЈСЂСНздгЩЖШ1/4жїЖЏаќМмЪ§бЇФЃаЭЁЃИљОнХЃЖйЕкЖўЖЈТЩЃЌдкЖдЦфдкЪмСІЗжЮіЕФЛљДЁЩЯНЈСЂЖЏСІбЇЗНГЬЃЌВЂвдДЫзїЮЊПижЦВпТдЗТецЕФЛљДЁЁЃ
2ЁЂНЈСЂТЗУцТЗЦзФЃаЭЃЌЬсГіаќМмадФмЕФЦРМлБъзМ
ПМТЧЕНТЗУцМЄРјЖдаќМмПижЦЕФживЊгАЯьЃЌНЋТЗУцМЄРјаХКХНсКЯЯЕЭГЗТецФЃаЭЁЃдкеёЖЏЗНУцЪЙгУАздыЩљаХКХРДФЃФтЪЕМЪЕФГжајЕФаЁЕФВЛЦНећТЗУцЃЛдкГхЛїЗНУцЪЙгУНздОгые§ЯвРДФЃФтЪЕМЪЭЙЦ№КЭАМПгЁЃ
ИљОнГЕСОЩшМЦвЊЧѓЕФЦНЫГадКЭВйзнЮШЖЈадЁЃбЁдёаќМмЕФЦРМлВЮЪ§ЮЊЃЛГЕЩэМгЫйЖШгУгкБэЪОГЕСОааЪЛЕФЦНЫГадаЇЙћЃЛаќМмЖЏФгЖШКЭТжЬЅЖЏдиКЩгУгкБэЪОГЕСОВйзнЮШЖЈадаЇЙћЁЃ
3ЁЂбЁЖЈПижЦЗНЗЈВЂЩшМЦПижЦЦї
НсКЯОЕфПижЦРэТлКЭЯжДњПижЦРэТлЃЌБОЮФВЩгУОпгаЪЕМЪгІгУМлжЕЕФPIDПижЦЃЌИљОнЦфдРэЩшМЦЦфПижЦЦїЁЃ
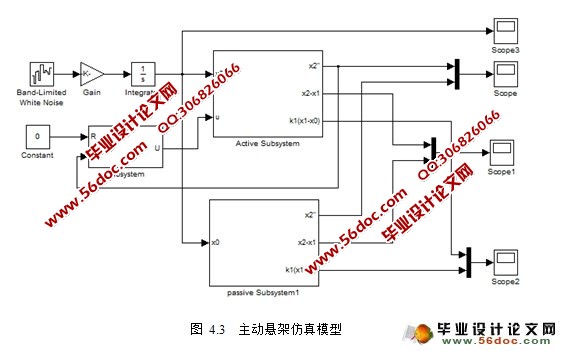
4ЁЂНЈСЂЗТецФЃаЭ
ИљОнНЈСЂЕФаќМмЯЕЭГЕФПижЦдРэЭМЃЌдкMatlabЗТецШэМўНЈСЂЦћГЕжїЁЂБЛЖЏаќМмЁЂPIDПижЦЦїЗТецФЃаЭЃЌШЛКѓЖджїЁЂБЛЖЏаќМмЕФадФмЗжЮіЖдБШЁЃ
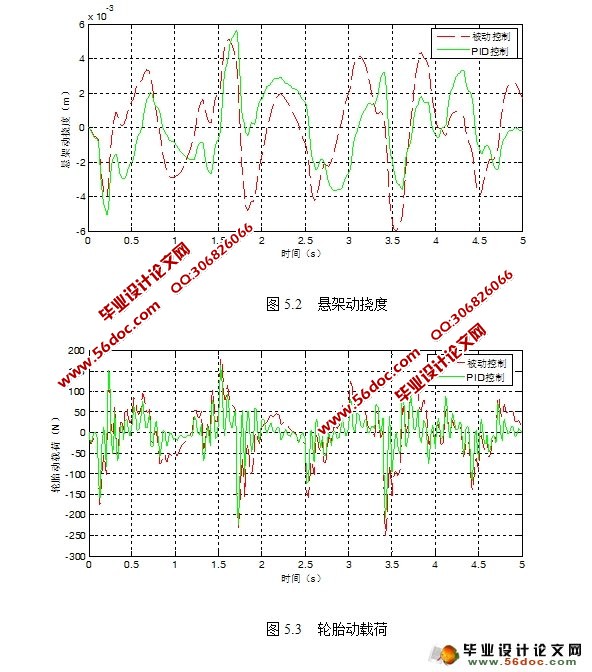
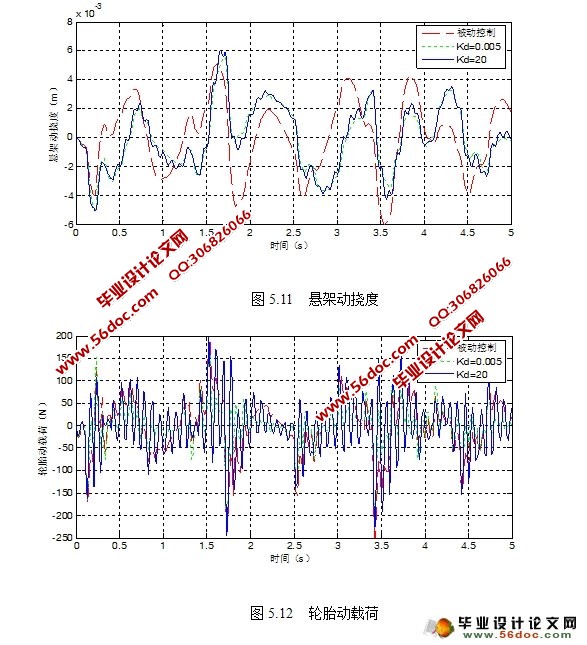
5ЁЂЗТецНсЙћЗжЮі
ВЮееГЕСОЩшМЦвЊЧѓЕФЦНЫГадКЭВйзнЮШЖЈадЃЌвдГЕЩэМгЫйЖШЁЂаќМмЖЏФгЖШКЭТжЬЅЖЏдиКЩжЕзїЮЊжївЊЦРМлжИБъЃЌЭЈЙ§ЖдШ§жжЪфШыаХКХЯТЕФПижЦВпТдЗТецЧњЯпНјааЗжЮіБШНЯЃЌЙщФЩзмНсГіПижЦВпТдЕФгХШБЕувдМАПЩааадгыгааЇадЁЃ
ФП ТМ
еЊ вЊ III
Abstract IV
ФП ТМ V
VI
1 аї Тл 1
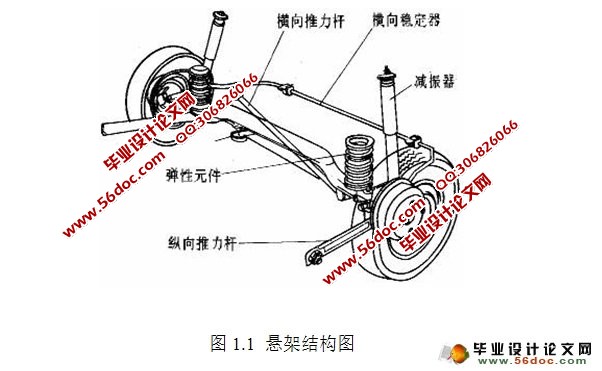
1.1 аќМмЯЕЭГНщЩм 1
1.1.1 аќМмЕФЙІФм 1
1.1.2 аќМмЕФЗжРр 1
1.2 жїЖЏаќМмПижЦРэТлбаОПЕФФПЕФКЭвтвх 4
1.3 ЙњФкЭтжїЖЏаќМмРэТлбаОПЖЏЬЌ 4
1.3.1 ЙњФкЭтжїЖЏаќМмЕФРэТл 4
1.3.2 ЙњФкЭтжїЖЏаќМмЕФгІгУ 5
1.3.3 ЙњФкЭтжїЖЏаќМмбаОПЧїЪЦ 5
1.4 БОТлЮФжївЊбаОПФкШн 6
2 ЦћГЕаќМмЦНЫГадЦРМлЗНЗЈ 8
2.1 ЦћГЕЦНЫГадИХЪі 8
2.1.1 ЦћГЕЦНЫГадЕФбаОПЗЂеЙИХПі 8
2.2 гАЯьЦћГЕЦНЫГадЕФвђЫи 10
2.2.l ТЗУцВЛЦНЖШЭГМЦЬиадЕФбаОП 10
2.2.2 гАЯьЦНЫГадЕФГЕЩэВПМўЕФбаОП 10
2.3 ЦћГЕЦНЫГадЦРМлЗНЗЈ 11
2.4 ЦћГЕаќМмЯЕЭГЕФЦРМлжИБъ 12
3 жїЖЏаќМмПижЦЯЕЭГЕФЖЏСІбЇФЃаЭ 13
3.1 жїЖЏаќМмЕФЪ§бЇФЃаЭ 13
3.1.1 ИХЪі 13
3.1.2 СНздгЩЖШжїЖЏаќМмЕФЖЏСІбЇФЃаЭ 14
3.2 ТЗУцТЗЦзФЃаЭНЈСЂ 16
3.2.1 ТЗУцВЛЦНЖШЕФЙІТЪЦз 17
3.2.2 ПеМфЦЕТЪЦзКЏЪ§гыЪБМфЦЕТЪЦзКЏЪ§ЕФзЊЛЏ 18
4 Лљгк1/4жїЖЏаќМмЯЕЭГФЃаЭЕФPIDПижЦ 21
4.1 жїЖЏаќМмPIDПижЦРэТл 21
4.1.1 PIDПижЦ 21
4.2 PIDПижЦЦїЕФВЮЪ§ећЖЈ 24
5 ЯЕЭГЕФМЦЫуЛњЗТецНсЙћгыЗжЮі 26
5.1 ЗТецЛЗОГMatlab/SimulinkМђНщ 26
5.2 ЗТецЪЕбщКЭНсЙћЗжЮі 27
5.2.1 АздыЩљаХКХЯТЕФБШНЯЃК 27
5.2.2 НздОаХКХЯТЕФБШНЯЃК 34
5.2.3 е§ЯваХКХЯТЕФБШНЯЃК 41
6 змНсКЭеЙЭћ 49
6.1 змНс 49
6.2 ВЛзужЎДІКЭеЙЭћ 49
жТ аЛ 51
ВЮПМЮФЯз 52
ИН ТМ 53
|
