基于单片机的清洁机器人设计(含CAD原理图零件图装配图)
来源:wenku7.com 资料编号:WK717130 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK717130
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
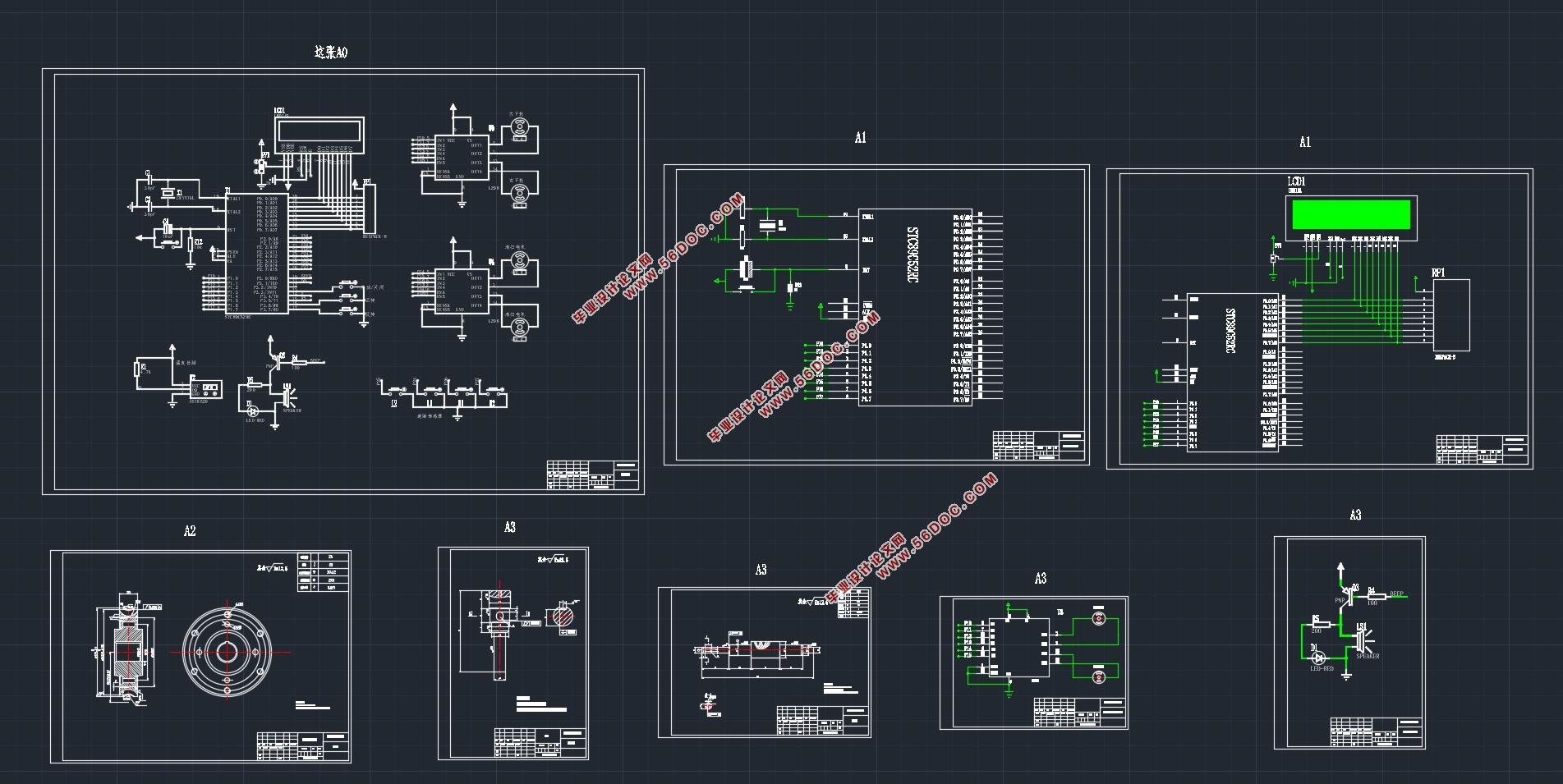
基于单片机的清洁机器人设计(含CAD原理图零件图装配图)(论文说明书22000字,外文翻译,CAD图10张)
摘 要
随着人们生活质量的提高,人们越来越重视珍惜时间,更倾向于将时间放在更加有意义的事情上,而不是将时间浪费在打扫卫生和整理家务上,并且生活节奏也越来越快,人们也没有太多时间去整理卫生。但是对生活舒适的居住环境的追求并未减弱,反而更加追求高品质的生活。
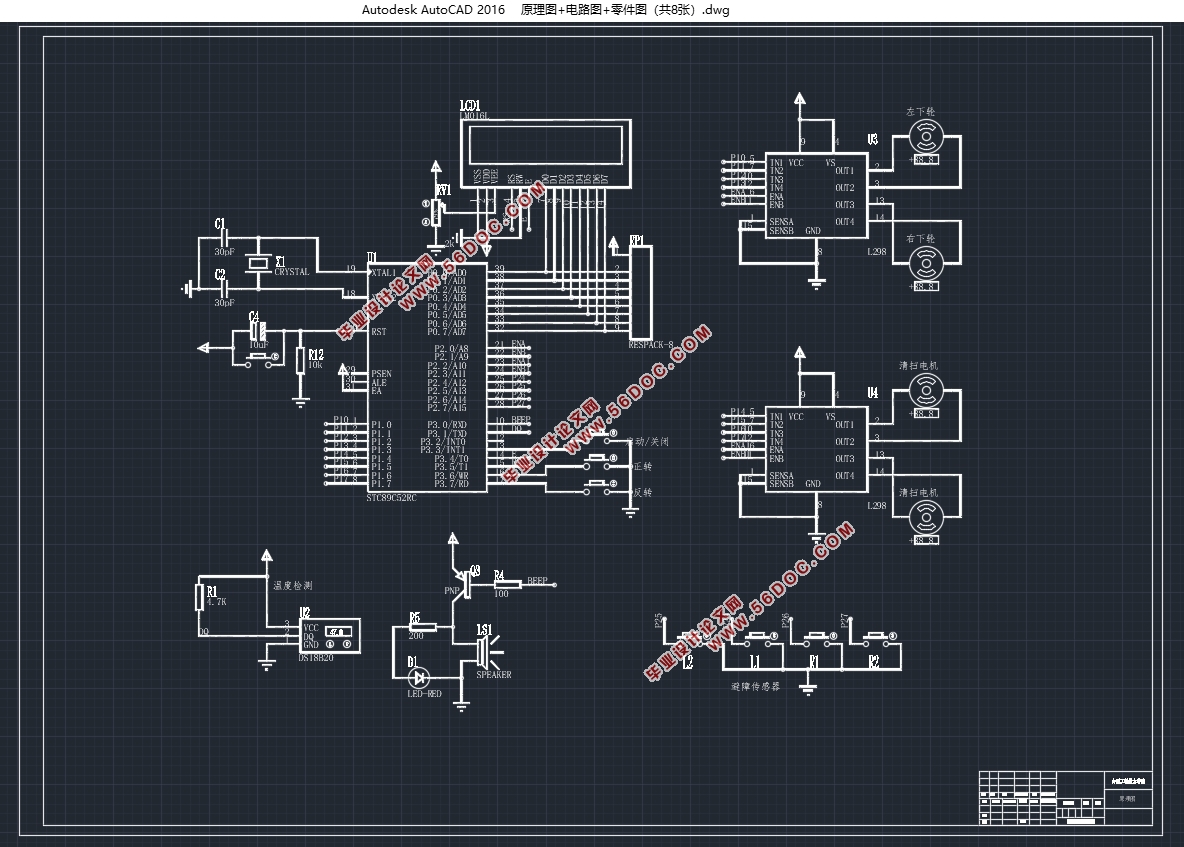
本文研究的主要内容就是基于单片机的清洁机器人设计。该设计以STC89C52RC单片机为控制核心,由L298N 驱动直流电机实现小车运动行驶功能;四个红外避障传感器去采集障碍物信息实现自动避障功能;能够实时监测清洁机器人的主机温度,当温度超过设定温度时,启动声光报警器提示主人停止机器人的运行;与此同时,由L298N驱动2个清扫直流电机,以充足的动力系统实现对灰尘或者垃圾的清扫功能。整个设计的设计结构清晰,采用性价比比较高的元器件,实现清洁机器人的基本功能。
关键词:驱动设计;避障设计;温度监控;声光报警;
Design of cleaning robot based on MCU
ABSTRACT
With the improvement of people’s quality of life, people pay more and more attention to cherishing time, preferring to spend time on more meaningful things, rather than wasting time on cleaning and housekeeping, and the pace of life is getting more and more. Soon, people don't have much time to organize hygiene. However, the pursuit of a comfortable and comfortable living environment has not diminished. Instead, it has pursued a higher quality of life. So the sweeping robot came into being. It can replace the owner to clean the entire living environment, save the owner's valuable time, and intelligently maintain the surrounding sanitation.
The main content of this paper is the design of the cleaning robot based on single-chip microcomputer. The design uses the STC89C52RC microcontroller as the control core, and the L298N drives the DC motor to realize the car sports driving function; four infrared obstacle avoidance sensors collect obstacle information to achieve automatic obstacle avoidance function; and can real-time monitor the host temperature of the cleaning robot when the temperature exceeds the design. When the temperature is set, an audible and visual alarm is activated to prompt the owner to stop the operation of the robot. At the same time, two cleaning DC motors are driven by the L298N to clean the dust or garbage with a sufficient power system. The design structure of the entire design is clear, and components with relatively high cost performance are used to achieve the basic functions of the sweeping robot.
Key Words: Driving design; obstacle avoidance design; temperature monitoring; audible and visual alarm;
总体设计方案
本文中要设计一款基于单片机的清洁机器人,该清洁机器人需要实现自动避障、充足动力清扫以及温度实时监测,超限报警的功能。如图 3 1所示,是本设计中的原理框框架图。由图可知,基于单片机的清洁机器人是由主控单片机、电机驱动、直流电机、显示模块、红外避障传感器模块、按键模块等组成。其中主控单片机采用STC89C52RC单片机,电机驱动用L298N,温度采集模块用的是DS18B20温度传感器,通过LCD1602液晶显示屏来监测机器工作的实时温度。本章主要是对主控单片机、电机驱动、温度传感器、避障传感器、显示模块设计方案进行论证并最终确立采用的元器件。
目 录
摘 要 i
ABSTRACT ii
1. 绪论 1
1.1 课题背景 1
1.2 研究目的和意义 1
1.3 设计要求 1
2. 国内外相关产品研究 3
2.1 国外产品研究状况 3
2.2 国内产品研究现状 8
3. 方案论证 10
3.1 总体设计方案 10
3.2 主控单片机的选择 10
3.3 电机驱动的选择 11
3.4 温度传感器的选择 12
3.5 避障传感器的选择 13
3.6 显示模块的选择 13
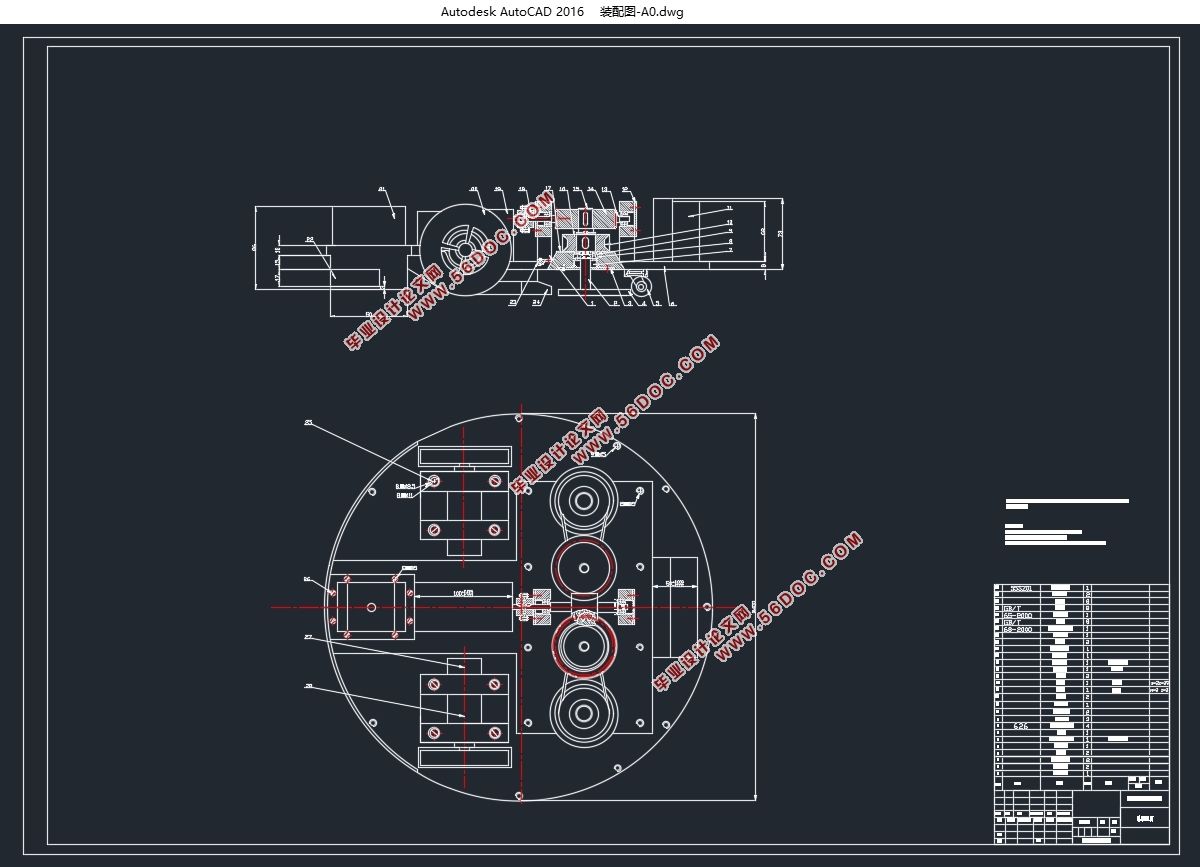
4. 清洁机器人的机械设计 15
4.1 机械结构组成和工作原理 15
4.2 清洁机器人总体设计 17
4.2.1 机器人外形设计 17
4.2.2 机器人的行走机构设计 18
4.2.3 清扫机构的设计 18
4.2.4 吸尘机构设计 20
4.2.5 垃圾收集处理机构设计 21
5. 硬件设计 24
5.1 电路设计方案 24
5.2 最小系统电路设计 25
5.3 方向驱动电路设计 26
5.4 清扫电机和吸尘电机驱动电路设计 27
5.5 避障电路设计 28
5.6 温度采集电路设计 29
5.7 显示电路设计 30
5.8 按键电路设计 30
5.9 声光报警电路设计 31
6. 软件设计 32
6.1 总设计思路 32
6.2 主程序设计 32
6.3 避障子程序设计 33
6.4 清扫电机控制子程序设计 34
6.5 温度采集子程序设计 35
6.6 温度显示报警子程序设计 36
6.7 按键子程序设计 37
7. 具体计算 39
7.1 行走电机选择 39
7.2 蜗轮蜗杆的选择 40
7.3 清扫机构的电机的选择 43
7.4 家庭清洁机器人电池的选用 43
7.5 清扫机构中蜗杆上轴承的寿命的计算 44
7.6 清扫机构中涡轮轴的校核 46
8. 系统调试 48
8.1 程序调试 48
8.2 仿真调试 50
8.3 问题总结分析 53
9. 总结与展望 54
9.1 总结 54
9.2 展望 54
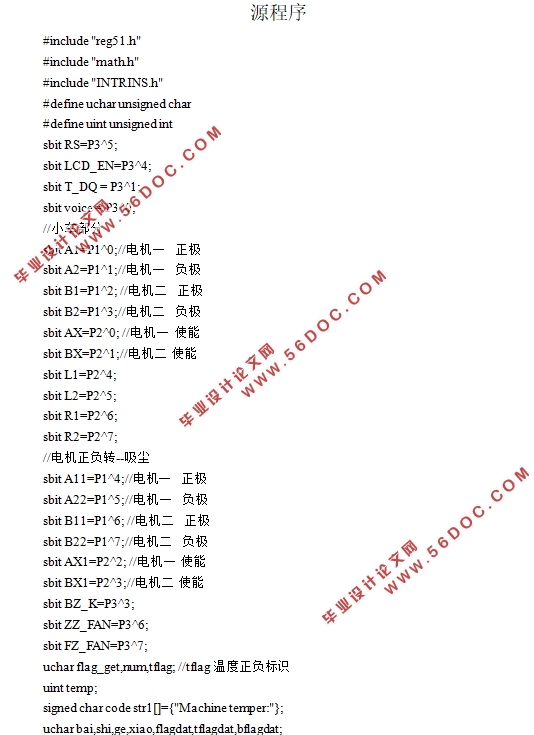
附录 56
参考文献 68
外文文献 70
中文翻译 78
致 谢 84
|
