基于AT89S52单片机控制的汽车倒车雷达系统设计(附程序清单)(任务书,开题报告,外文翻译,论文14000字,程序清单)
摘 要
随着汽车的普及率连年攀升,在人们享受汽车带来的便利与舒适的同时,汽车倒车事故也日益增多。驾驶员在倒车时由于视野范围有限,不能够了解汽车与障碍物之间的距离,所以存在很大的隐患。汽车倒车雷达正是提高汽车倒车安全性的一项重要技术。
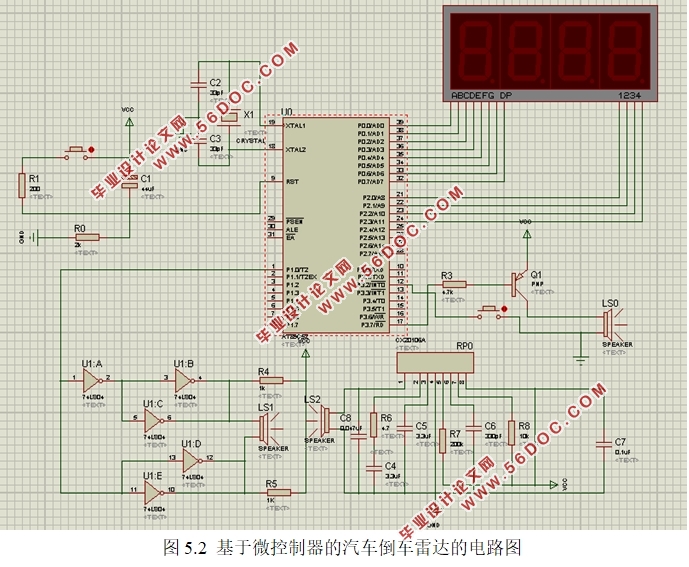
本文研究设计了一种汽车倒车雷达系统。该系统由AT89S52单片机、超声波发射电路、超声波接收放大电路、距离显示电路及报警电路组成。采用超声波测距原理,由单片机计时,并由数码管显示距离并发出其警示信号,得到及时警示。本文结合理论分析、硬件电路设计以及软件仿真等研究手段,完成了汽车倒车雷达系统软件和硬件的设计,并最终完成了实物的搭建实现了真正的功能。
该系统能够在汽车倒车时实时显示障碍物与汽车之间的距离,同时在距离很低的时候实时的发出报警,可以有效地解决驾驶员在进行倒车时前后左右探视所引起的困扰,大大提高了汽车倒车的安全性。
关键词:超声波测距;倒车雷达;单片机;系统仿真
Abstract
In recent years, the popularity of vehicle increasingly improves, while people enjoy the convenience and comfort of the car, car reversing accidents are also increasing. When reversing, the driver can not know the distance between the car and the obstacle, so there is a lot of hidden danger. Car reversing radar is an important technology to improve the safety of the car reversing.
In this paper, we study and design a kind of vehicle reversing radar system. The system is composed of AT89S52 single chip microcomputer, ultrasonic emission circuit, ultrasonic receiving and amplifying circuit, distance display circuit and alarm circuit. Using ultrasonic ranging principle, with the micro-controller timer and the digital tube to display distance timely, it will warn while the distance is very low. Combined with theoretical analysis, hardware circuit design and software simulation research method, this paper completed the design of the car reversing radar system software and hardware, and finally completed the physical structures to achieve the real function.
The system can show the distance between obstacles and cars timely when reversing the car, and it will warn while the distance is very low. It can effectively solve the problem of a driver in reversing , and greatly improving the security while car reversing.
Key words: ultrasonic ranging;reversing radar;MCU;system simulation
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究背景及意义 1
1.2 超声波测距发展历程 1
1.3超声波测距国内外研究现状 2
1.4 本文主要工作及文章结构 2
第2章 超声波测距的理论研究 4
2.1 超声波测距的基本工作原理 4
2.2 超声波测距距离分析 4
2.3 超声波测距方案研究 5
2.3 超声波测距可行性分析 6
2.4 本章小结 7
第3章 系统硬件设计 8
3.1 系统总体设计 8
3.2 单片机控制模块硬件设计 8
3.3 超声波发生模块硬件设计 10
3.4 超声波接收模块硬件设计 11
3.5 障碍物信息指示器模块 13
第4章 系统软件设计 15
4.1 软件总体流程设计 15
4.2 主程序模块设计 15
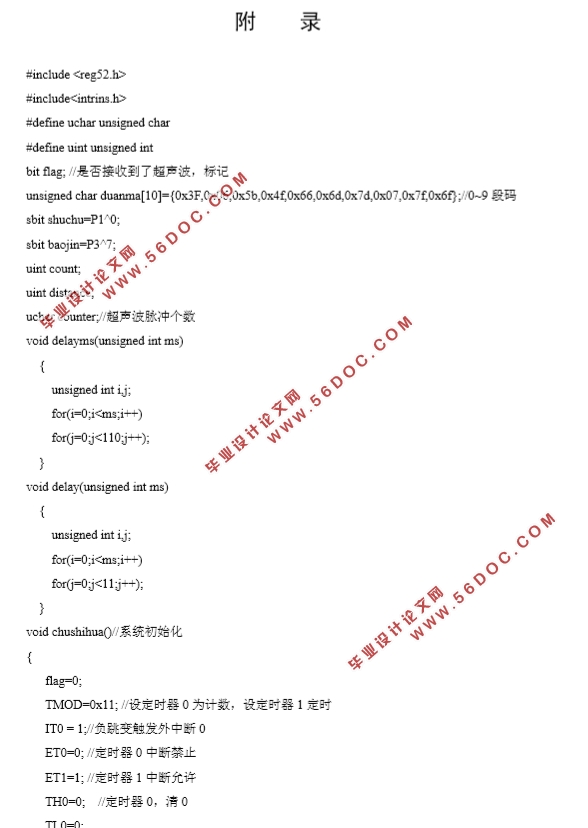
4.3 初始化模块设计 16
4.4 延时模块设计 18
4.5 中断停止计时模块 18
4.6 数据处理模块 19
4.7 发射超声波计时模块 20
4.8 数码管显示模块 21
4.9 报警模块 21
4.10 软件抗干扰 22
4.11 本章小结 22
第5章 汽车倒车雷达的电路实现 23
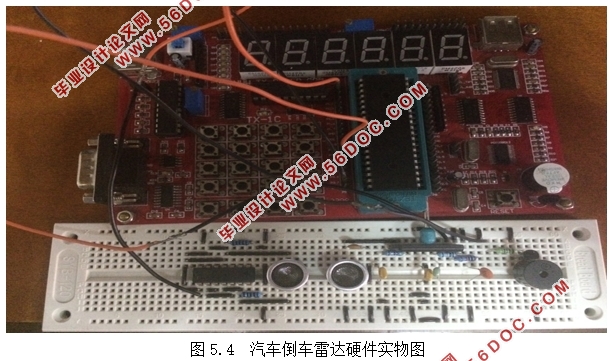
5.1 汽车倒车雷达系统的电路实现 23
5.2 实现流程 24
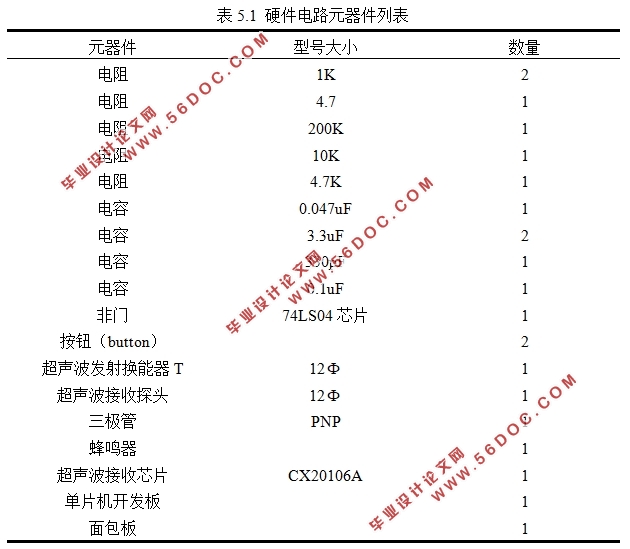
5.3 硬件电路搭建 24
5.2 软件实现与操作 27
5.3 系统调试 27
5.4 实验结果分析 28
5.5 实验系统改进 28
5.6 本章小结 29
第6章 总结 30
参考文献 31
致 谢 32
|
