基于单片机的超声波倒车雷达的设计(附程序代码,仿真,原理图,PCB图)(任务书,开题报告,外文翻译,论文12000字,程序代码,仿真,原理图,PCB图,元件清单)
摘要
众所周知,中国的驾驶员数量每年上升的都十分快。据统计,我国汽车驾驶员数量已经达到2.44亿,而且汽车保有量也以达到1.54亿。日益增长的汽车数量使得人们对于驾驶安全越来越重视,而倒车时由于视野受限,驾驶员很容易误判距离而发生碰撞,因此越来越多的驾驶员开始为自己的车辆装配倒车雷达。本文的目的就是设计基于单片机的超声波倒车雷达。它是一种辅助的泊车装置,能够帮助驾驶员在车内也能大致了解车尾的情况。
本次设计采用AT89C51单片机作为核心,在第一部分介绍了设计的目的意义和具体实现的功能参数。下一部分着重对几种超声波测距方法进行了比较,阐述了各种方法的优缺点,并说明了所选方法的工作原理。第三部分介绍了系统的硬件构成,又细分小节解释了各硬件电路的组成和各芯片的特点。下面的小节主要写了系统的主流程及各子模块的流程。最后一部分写了仿真的过程和结果。
本设计实现的功能包括车尾距离障碍物的距离以及当地实时温度会自动显示在LCD显示屏上,且距离的显示范围在0~500cm之间;蜂鸣器会根据距离的远近自动调整报警频率,距离障碍物越近,蜂鸣器报警频率越高。该系统的特点是能够根据温度自动补偿,易于实现,可靠性强等等。
关键词:倒车雷达;超声波测距;AT89C51
Abstract
Asis known to all, the population of Chinese driver is growing too fast every year. According to the statistics, the number of car drivers in our country has reached up totwo hundred and forty-four million now and car ownership is also in order to achieve one hundred and fifty-four million. The increasing number of cars has made people pay more and more attention to the safety of driving, while reversing due to limited vision, so the driver is easy to judge the distance wrongly and cause collision, thus more and more drivers began to assemble Parking Distance Control for their vehicles. The purpose of this paper is to design a microcontroller basedon ultrasonic Parking Distance Control. It is a kind of auxiliary parking device, and it can help drivers in the car to understand the situation of the tail of the car generally.
This design uses AT89C51 single chip microcomputer as the core, and in the first part, it introduces the purpose and significance of the design and specific implementation of the functional parameters. The next part of the paper focuses on the comparison of several methods of ultrasonic distance measurement and the advantages and disadvantages of various methods are expounded, explaining the working principle of the method. In the third part, the hardware structure of the system is introduced and the composition of the hardware circuit and the characteristics of each chip are explained in the subsection section. The following section mainly wrote the main process of the system and the flow of each sub module. In the last part, the process and result of simulation are written.
The function of the design includes the distance of the vehicle tail distance obstacle and the local real-time temperature display automatically on the LCD display screen and the distance between the display ranges in 0~500cm;The buzzer will automatically adjust the alarm frequency according to the distance andthe closer the distance obstacle, the higher the buzzer alarm frequency is. The characteristic of this system is that it can be compensated automatically according to the temperature, easy to implement, strong reliability and so on.
Key Words:Reversing radar; Ultrasonic range finder; AT89C51

目录
第1章绪论 1
1.1设计的目的及意义 1
1.2 倒车雷达的国内外研究现状 2
1.3 本次设计的内容及技术参数 3
1.4 各章节安排 3
第2章方案论证 5
2.1 总体设计方案 5
2.2 超声波测距理论分析 5
2.3 超声波传感器 6
2.3.1 超声波传感器的原理及结构 6
2.3.2 超声波传感器的主要性能指标 6
2.4 本章总结 7
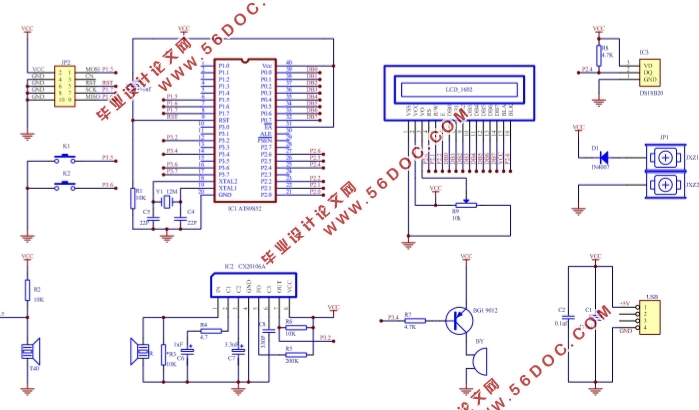
第3章硬件设计 8
3.1 单片机主控系统电路设计 8
3.1.1 电源电路 8
3.1.2 时钟电路 9
3.2 超声波发射电路 9
3.3 超声波检测接收电路 10
3.4 温度采集电路 10
3.5 蜂鸣器电路 11
3.6 LCD显示电路 12
3.7 本章总结 13
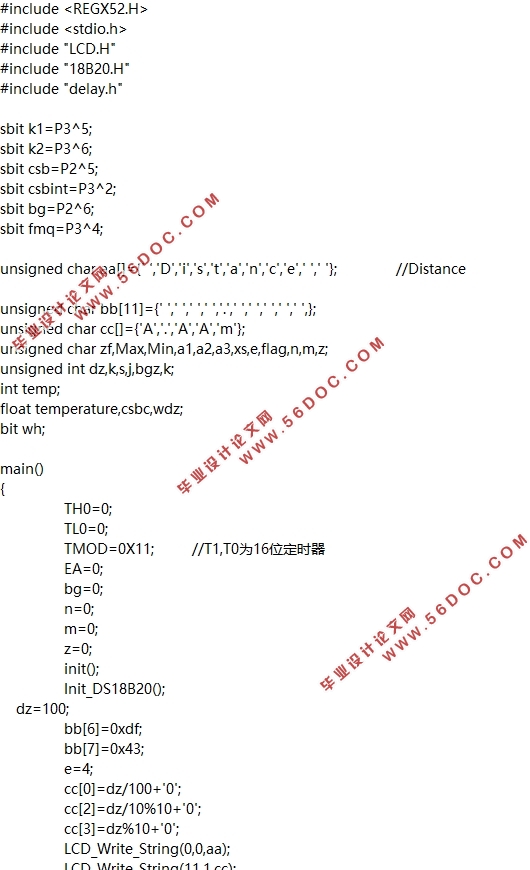
第4章软件设计 14
4.1 主程序设计 14
4.2 定时器中断服务程序 14
4.3 INT0中断服务程序 15
4.4 测温子程序 16
4.5 距离计算子程序 16
4.6 显示子程序 17
4.7 报警子程序 18
4.8 本章总结 19
第5章仿真调试 20
5.1 系统仿真调试内容 20
5.2 仿真结果分析 22
5.3 本章总结 22
第6章总结 23
参考文献 24
致谢 25
附录系统硬件电路图 26
|
