基于STM32的智能灭火机器人设计(任务书,开题报告,外文翻译,论文13000字)
摘 要
随着我国经济迅速发展,城市化的进程越来越快,大量的高层建筑拔地而起,大型商场、物流仓库、易燃物品的存储仓库等场所的规模也在不断扩大,导致近年来火灾频繁发生。这些可能发生火灾的场所通常伴随着巨大的危险,消防人员不易进入,灭火救援行动难以及时开展,因而由火灾导致的财产损失和人员伤亡通常非常严重,研究智能灭火机器人刻不容缓。本设计中的智能灭火机器人使用了高性能、低功耗、接口丰富的STM32作为控制芯片,便于实现智能灭火机器人功能的拓展。
本设计中的智能灭火机器人采用了双轮平衡小车的设计,相对于四轮机器人具有更高的灵活性和火场机动能力,适合在复杂条件下快速找到火源进行灭火。
本文首先介绍了智能灭火机器人的主控制器、传感器以及电机的选型;之后根据所选择的器件搭建了硬件系统,设计了相应的控制电路、电机驱动电路和电源电路;然后在软件设计方面,机器人姿态控制算法通过JY-901姿态传感器快速获取机器人当前姿态信息,并传递给控制器,进而控制电机的转速和正反转来保证机器人能够平衡直立行走,并且结合光电传感器、火焰传感器等传感器设计了灭火机器人转向的算法,实现灭火机器人在复杂环境中自主循迹避障和寻找火源的功能。
关键词:STM32;灭火机器人;PWM控制;传感器
Abstract
With the rapid development of China's economy, the process of urbanization is getting faster and faster, and a large number of high-rise buildings are emerging. The scale of large-scale shopping malls, logistics warehouses, storage warehouses for flammable materials, etc. is also expanding, leading to fires in recent years. It happens frequently. These places where fires may occur are often accompanied by huge dangers. Firefighters are not easy to enter, and firefighting and rescue operations are difficult to carry out in time. Therefore, property damage and casualties caused by fires are usually very serious. It is urgent to study intelligent fire extinguishing robots. The intelligent fire extinguishing robot in this design uses the STM32 with high performance, low power consumption and rich interface as the control chip, which is convenient for the expansion of the function of the intelligent fire extinguishing robot.
The intelligent fire-extinguishing robot in this design adopts the design of the two-wheel balance trolley. Compared with the four-wheeled robot, it has higher flexibility and fire field maneuverability. It is suitable for quickly finding fire sources to extinguish fire under complicated conditions.
This paper first introduces the selection of the main controller, sensor and motor of the intelligent fire extinguishing robot; then builds the hardware system according to the selected device, designs the corresponding control circuit, motor drive circuit and power supply circuit; then in software design, The robot attitude control algorithm quickly acquires the current attitude information of the robot through the JY-901 attitude sensor and transmits it to the controller, which in turn controls the rotation speed and forward and reverse of the motor to ensure that the robot can balance the vertical walking, and is designed with sensors such as photoelectric sensors and flame sensors. The algorithm of the fire-fighting robot steering realizes the function of the fire-fighting robot to autonomously follow obstacles and find the fire source in a complex environment.
Key Words:STM32;Fire extinguishing robot;PWM control;sensor

目录
第1章绪论 1
1.1 设计背景及意义 1
1.2 灭火机器人的发展历程 1
1.3 国内外研究现状 2
1.4 论文研究内容与章节安排 3
第2章智能灭火机器人总体方案设计 5
2.1 设计需求分析 5
2.2 智能灭火机器人系统组成 5
2.3 单片机选型 6
2.4 传感器的选型与分析 7
2.4.1 火焰传感器 7
2.4.2 光电循迹传感器 8
2.4.3 超声波测距模块 8
2.4.4 姿态传感器 9
2.5 电机及其驱动选型与分析 10
2.5.1 电机选型 10
2.5.2 电机驱动选型 11
2.6 本章小结 12
第3章智能灭火机器人硬件系统设计 13
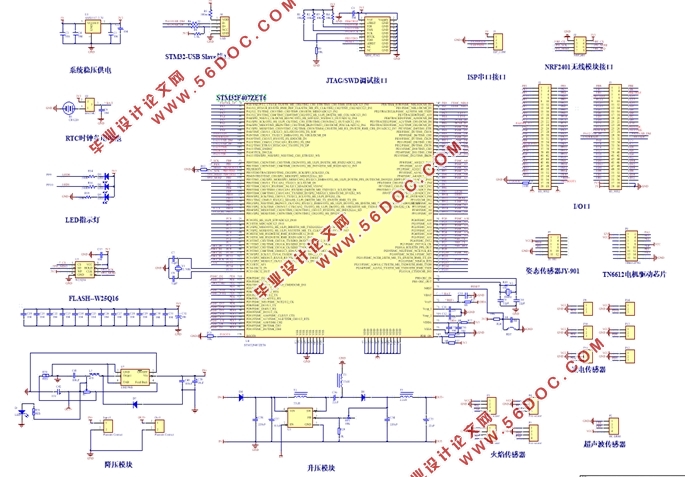
3.1 主控制电路设计 13
3.2 电机驱动电路设计 14
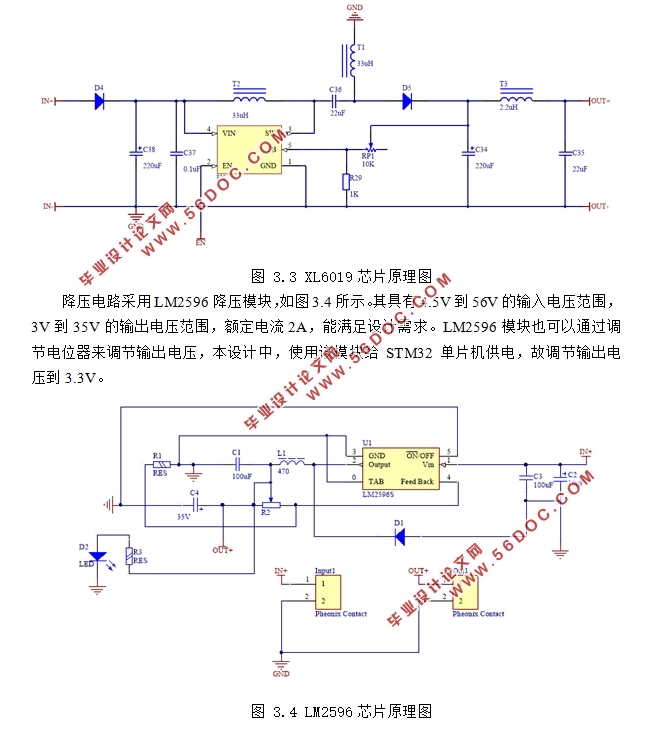
3.3 电源电路设计 14
3.4 机械结构设计 15
3.5 本章小结 16
第4章智能灭火机器人软件设计 17
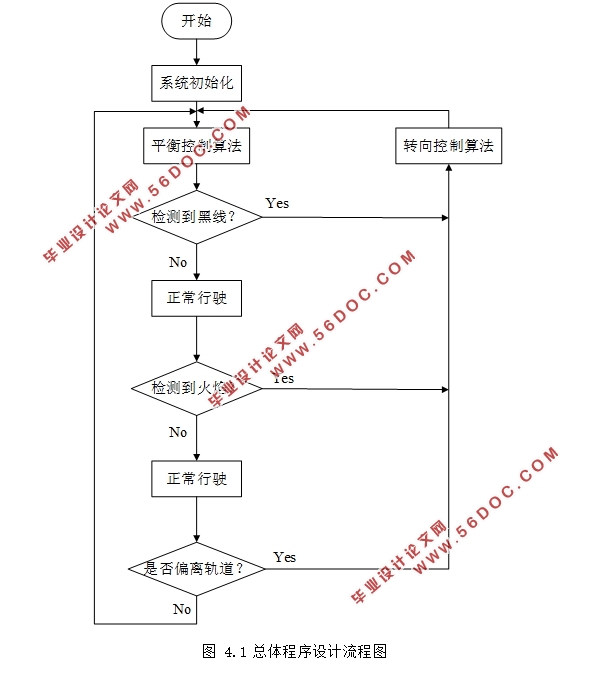
4.1 软件总体设计方案 17
4.2 姿态传感器控制算法设计 18
4.2.1 JY-901串口通信 18
4.2.2 JY-901数据处理算法 19
4.3 智能灭火机器人电机控制 20
4.3.1 PWM控制原理 20
4.3.2 PWM控制算法 21
4.4 智能灭火机器人平衡算法设计 22
4.4.1 平衡控制原理 22
4.4.2 平衡控制算法 24
4.5 智能灭火机器人转向算法设计 25
4.6 本章小结 26
第5章总结与展望 27
5.1全文总结 27
5.2展望 27
参考文献 28
附录 29
附A1STM32主控板原理图 29
附A2 智能灭火机器人整体电路原理图 30
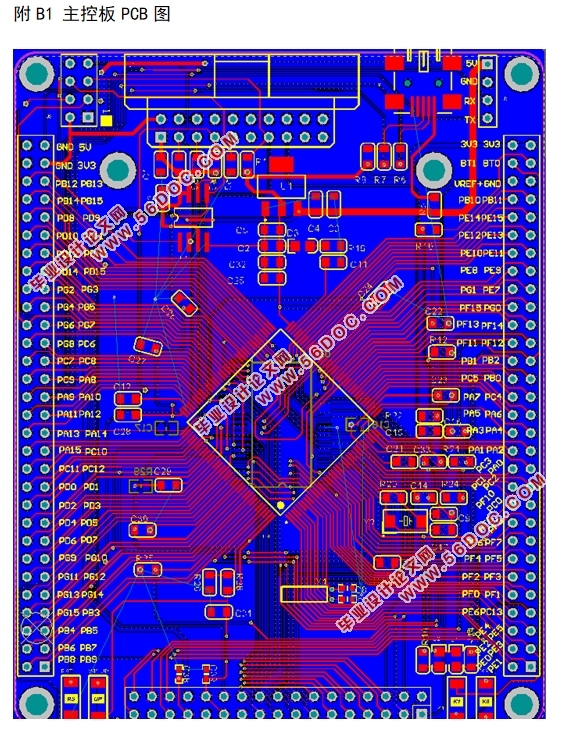
附B1 主控板PCB图 31
致谢 32
|
