Abstract
In this topic, a new glass-wiping robot is targeted and its control system based on STM32 is developed. The main completed design work includes:
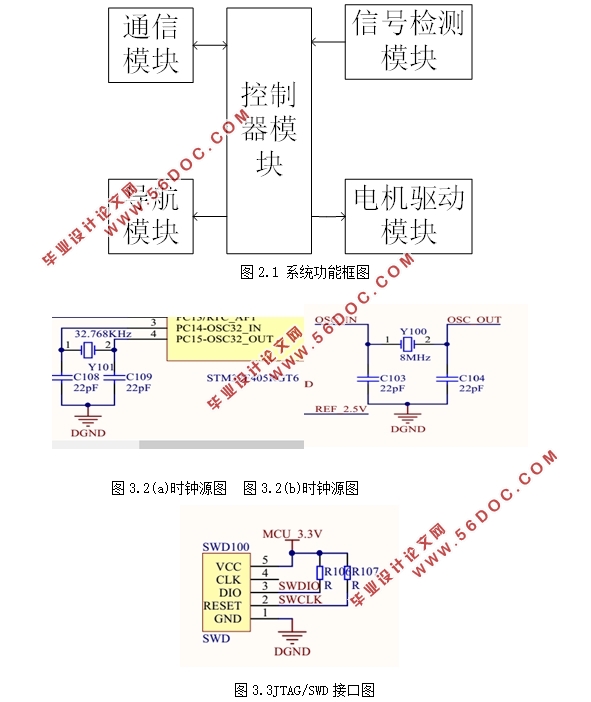
(1) Carry out robot function analysis and define the robot hardware function module;
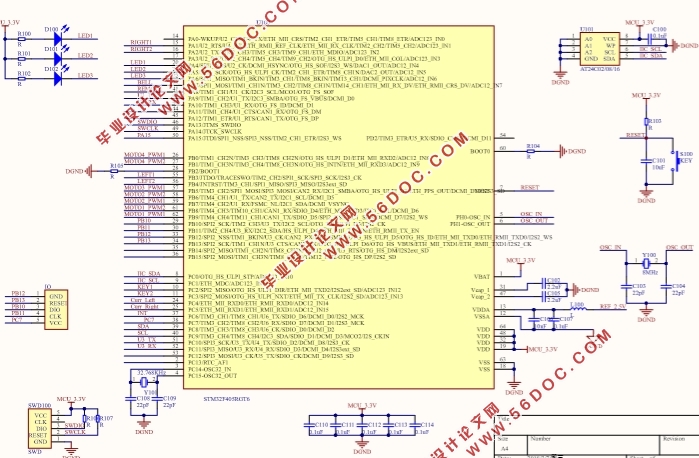
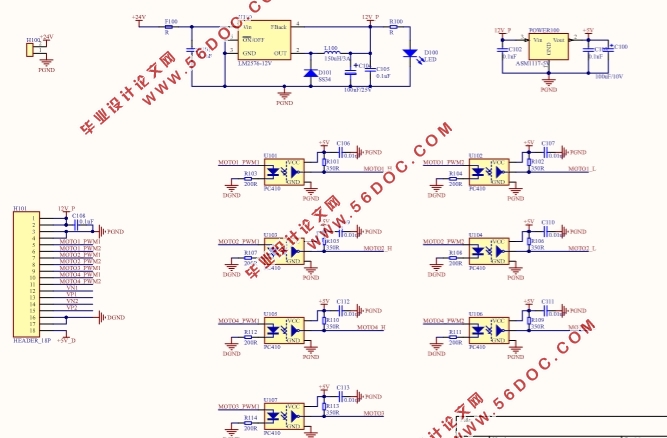
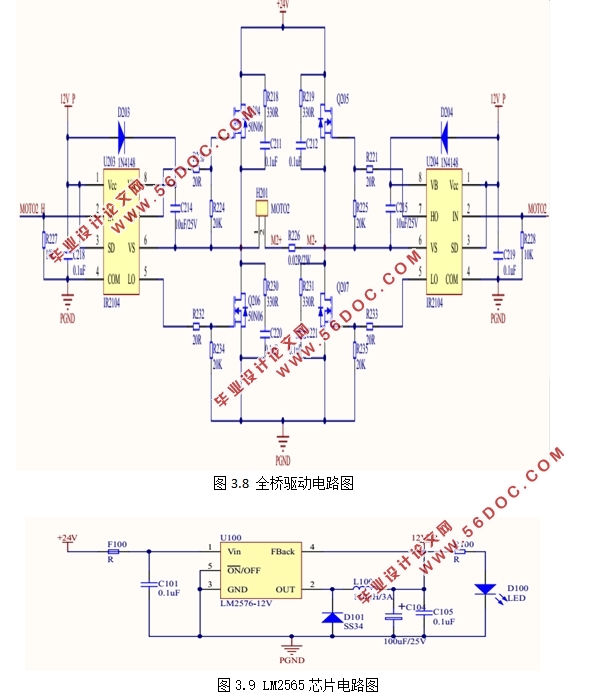
(2) Design control system hardware based on STM32, build embedded software architecture, and develop control programs for basic functional modules;
(3) Prepare a control system prototype and carry out the design and verification of the implementation technology.After the commissioning is completed, the control system can drive the robot to wipe the glass.
Keywords: glass-wiping robot ;control system; STM32; current detection; PWM control