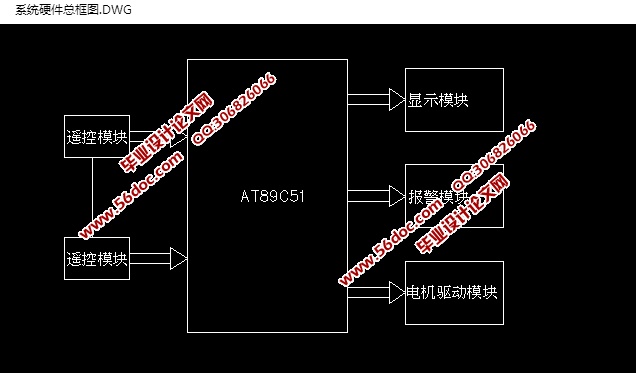
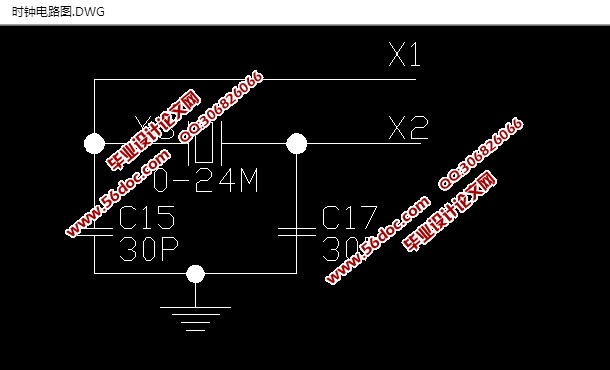
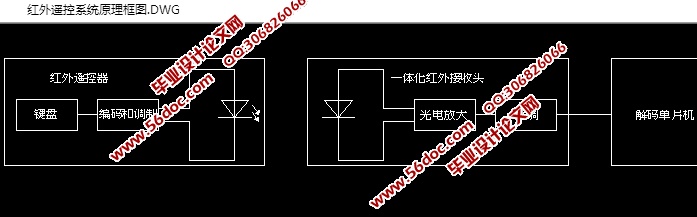
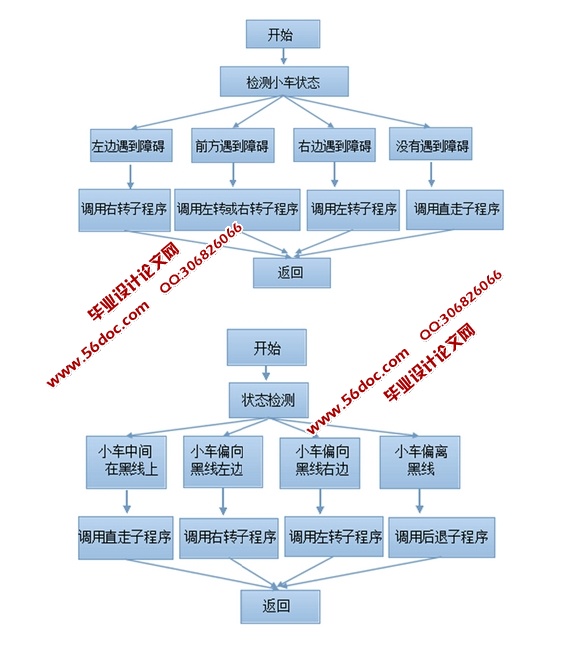
基于C51单片机智能小车的设计(含电路图,原理图) 来源:wenku7.com 资料编号:WK715147 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK715147 以下是资料介绍,如需要完整的请充值下载。 1.无需注册登录,支付后按照提示操作即可获取该资料. 2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助 我要下载该资源 资料介绍 基于C51单片机智能小车的设计(含电路图,原理图)(论文8400字,电路图,原理图,流程图) 摘要 智能小车是当今科技智能化的产物,它能够在行驶中自动寻迹以及绕过障碍物到达目的地,本设计采用 MCS-51 系列中的 C51单片机作为原型,以C51作为控制核心,利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以实现自动记录时间、里程和速度,自动寻迹和寻光等等功能。本文以单片机为核心设计了系统结构图、程序指令、流程图等等,在保留了原始智能小车控制系统的基本功能的同时又增加了一系列的实用功能并简化其电路结构,其将以控制方便,灵活,只要改变输入单片机的控制程序,便可控制小车的行驶轨迹。 关键词:智能小车;89C51;结构图;控制 智能小车总体概况 本次设计的智能小车以C51为核心,经焊接相关芯片用电路板自制而成,通过 I/O 口检测信号,输出信号到L293D,从而驱动两个直流电机控制其前进、停止、左 转、右转。检测信号则为三组红外发射和接收管,一组黑线时输出高电平,白线 时输出低电平。另两组黑线时输出低电平,白线时输出高电平。 智能小车的控制器使用 ATMEL 公司的C51单片机。 程序设计上使用了时钟中断来控制小车行驶的状态检测,使用外部中断来记录小车行驶的距离,软件上设置了一个状态寄存器,来记录小车运行的状态,小车的运行为延黑线行驶状态,避障碍物状态等。在黑线上行驶时,控制器检测红外传感器,如果小车行驶偏离方向,则控制 小车转向轮进行转向。 在避障状态时,控制器检测红外传感器,判断前方是否有障碍物,如果有 障碍物则控制汽车进行转向,躲避障碍物。 本次课题的内容是基于单片机的智能小车的设计,以单片机为控制核心,采用模块化的设计方案,运用光电传感器、超声波传感器等组成不同的检测电路,实现小车在行驶中自动寻迹、躲避障碍物,利用光电传感器进行自动寻迹,实现了小车能够沿着黑线行走。利用超声波传感器检测道路上的障碍物。通过单片机来控制电机的工作,从而实现对整个小车系统的运动控制。 2.1 方案论证 简易性能; 采用动态共阴显示行驶时间和里程。 2.2 系统硬件总体框图 本次设计的智能小车以C51为核心,将其作为主控芯片来处理各个模块的运营 3.1 主控芯片介绍 HT6221是合泰公司生产的多功能遥控编码芯片,工作电压在1. 8V-3.5V,其采用PPM(Pulse Position Modulation)进行编码,周期能编码16位地址码和8位数据码,最多能同时支持32个活动键。 目 录 第一章 绪 论 1 1.1智能小车总体概况 2 1.2国内外发展状况 3 1.3课题的提出及主要任务 5 第二章 系统方案设计 6 2.1方案论证 6 2.2系统硬件总体框图 6 第三章 硬件电路的设计 10 3.1主控芯片介绍 13 3.2 ULN2003芯片简介 13 3.3单片机控制模块 15 3.3.1 时钟电路 16 3.3.2 复位电路 16 3.3.3 单片机控制模块 17 第四章 软件系统的设计 17 4.1主程序流程图 17 4.2 避障循迹模块程序设计 18 4.2.1避障程序流程图 18 4.2.2循迹程序流程图 18 4.3 红外遥控系统原理框图 19 4.4 数据显示模块程序设计 20 第五章 系统调试 22 5.1 硬件调试 23 5.2 软件调试 24 5.3 软硬联调 25 结 论 25 参考文献 26 致 谢 27