全地形移动机器人控制系统设计(附电路图,原理图,程序)
来源:wenku7.com 资料编号:WK713994 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9AWK713994
以下是资料介绍,如需要完整的请充值下载。
1.无需注册登录,支付后按照提示操作即可获取该资料.
2.资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
全地形移动机器人控制系统设计(附电路图,原理图,程序)(任务书,开题报告,外文翻译,论文说明书7000字)
摘 要
时代在进步,社会在发展。作为机器人学中的重要分支,移动机器人已经广泛运用于医学,军事,农业以及人们的日常生活中,可以说,人类社会离不开移动机器人。
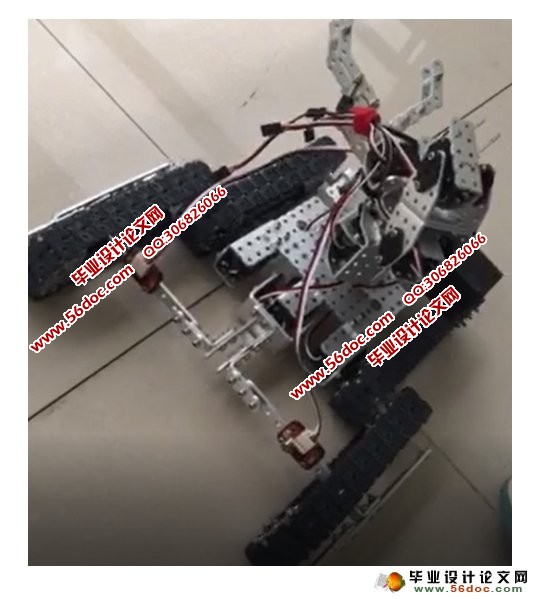
本课题着重研究以“探索者”机电创新平台自主设计搭建并进行控制系统设计的全地形移动机器人。主要包括以SolidWorks为设计平台,对机器人进行结构设计以及运动仿真,硬件的选用布置以及软件设置以及基于c语言的程序编写。
基于“探索者”我选用了近红外传感器,语音识别模块,圆周伺服电机以及arm-7主控板。通过平台提供的TKStudio软件进行代码编写,通过Flash magic进行程序的烧写。最终完成机器人的自主启动停止避障的功能。
关键词:“探索者”机电创新平台;全地形机器人;控制系统
Based on the "Explorer" electromechanical innovation platform of the all terrain mobile robot control system design
Abstract
Times are progressing and society is developing. As an important branch of robotics, mobile robots have been widely used in medical, military, agriculture and people's daily life, it can be said that human society can not be separated from the mobile robot.
This paper focuses on the "Explorer" mechanical innovation, platform independent design build and design system of all terrain mobile robot control. Including the SolidWorks as a design platform for the robot to carry out structural design and motion simulation, hardware selection and layout as well as software settings and the preparation of the program based on C language.
Based on "Explorer" I chose the near infrared sensor, a voice recognition module, the circumference of the servo motor and arm-7 main control board. Provided by the platform of software TKStudio of code written, programs by flash magic programming. Finally completed the robot self start stop function of obstacle avoidance.
Key words: "Explorer" electromechanical innovation platform; all terrain robot; control system
目 录
摘 要 II
Abstract III
1 绪 论 1
2 全地形移动机器人底盘结构设计 2
2.1全地形移动机器人爬楼梯机理分析 2
2.2底盘设计 5
2.3履带设计 7
3 全地形移动机器人的控制系统硬件设计 9
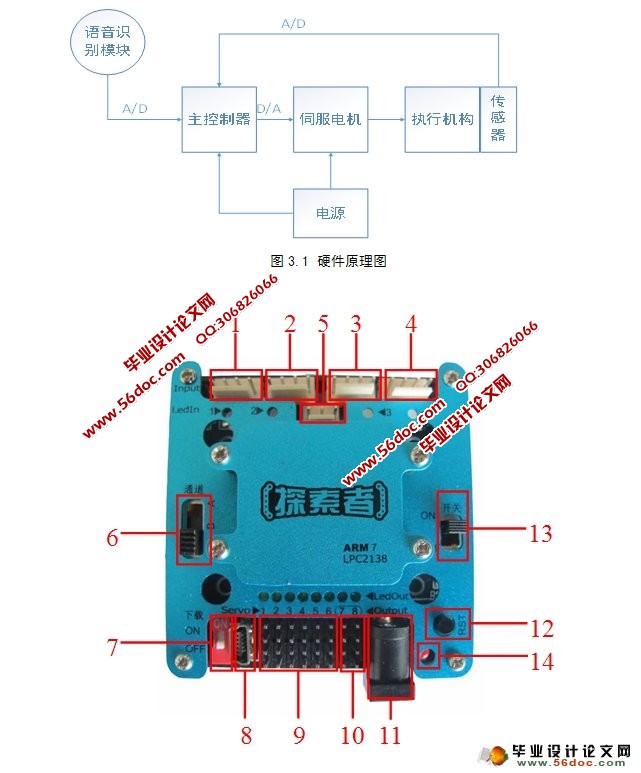
3.1全地形移动机器人总体构成 9
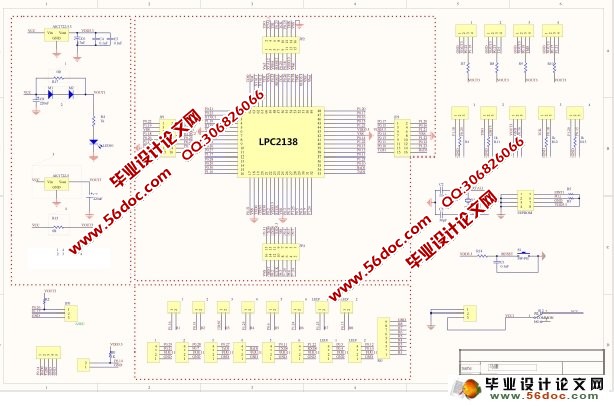
3.2 主控制器 9
3.3近红外传感器 11
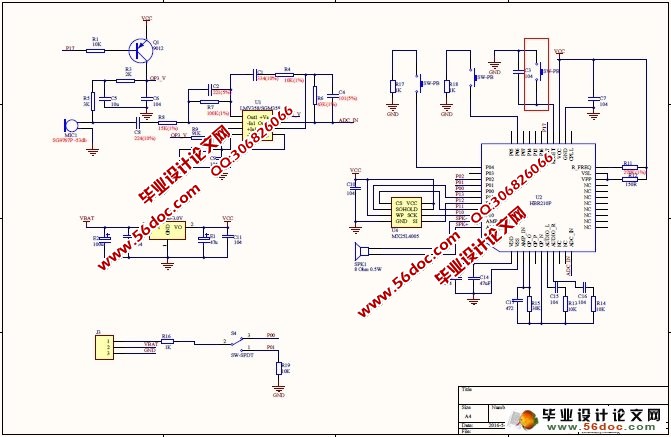
3.4语音识别模块 12
3.5电源系统 13
4软件设计 14
4.1控制系统原理 14
4.2系统软件操作 14
5 实验结果 19
参考文献 20
致 谢 25
|
